
機器人揀選作業是由機器人來進行品種揀選,如果品種多,形狀各異,機器人需要帶有圖象識別系統和多功能機械手,機器人每到一種物品托盤就可根據圖象識別系統“看到”的物品形狀,采用與之相應的機械手抓取,然后放到搭配托盤上。分揀抓取機器人要進入市場仍需一段時間,一旦這些智能化的分揀機器人應用于電子商務、工廠、物流等行業,將極大地提高倉儲管理的工作效率,壓縮人工成本。短期內倉儲系統必然是以自動化與人工輔助的形式存在的,要真正實現無人倉儲還需要一段時間。
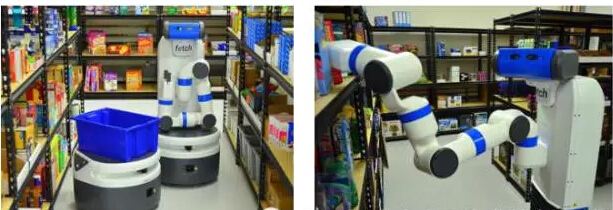
3.1 Fetch and Freight :揀貨機器人和倉儲運輸機器人的深度結合
Fetch和Freight是硅谷機器人公司FetchRobotics的倉儲機器人。Fetch Robotics成立于2014年,2015年6月從以軟銀為中心的三家公司獲得了2000萬美元的融資。Fetch Robotics與Innovation Matrix于2015年7月底締結了銷售合作關系。Innovation Matrix將在日本、臺灣、新加坡和澳大利亞銷售Fetch Robotics的商品。
Fetch and Freight 實現揀貨機器人和倉儲運輸機器人的深度結合,從而保證整個倉儲系統的無縫運行。Fetch and Freight主要包括兩個部分,配備可從貨架上拿取特定商品的機械臂的Fetch;與Fetch一同行動,運輸拿到商品的“Freight”。 Fetch可利用攝像頭、圖像處理和導航技術等,根據訂單內容,利用機械臂將位于貨架某一位置上的特定商品取下來,然后交給Freight運回打包。不工作時,機器人會自動返回充電樁進行充電。

Fetch and Freight工作原理: Fetch經由無線LAN與服務器通信,根據服務器的指示在貨架之間移動,撿取商品。移動過程中利用激光傳感器和攝像頭掌握周圍的情況,實時將障礙物的位置錄入數字地圖中。這樣就能一邊躲避障礙物一邊向正確位置移動。Fetch的機械臂長2英尺(約60厘米),配備7個關節,能在避開貨架和其他商品的同時,拾取最大6千克重的商品。Fetch取下的商品交給一同行動的Freight。
Freight也配備了激光傳感器和攝像頭,能根據數字地圖邊躲避障礙物邊自律移動。“Fetch”和“Freight”都可以自動跑去充電,使用相同的充電座。從電池到驅動器,Fetch都是明顯地瞄準產品需求,而非實驗室需求。它們耐久力很好,即使在最差的使用場景下也有一萬三千小時的使用壽命(指讓機械臂連續揮舞一個6公斤負載)。在更一般的情況下,“Fetch”預計可用每天工作16小時,一年工作365天,連續四年而不發生故障。“Freight”因為沒有安裝復雜的機械臂,預計可以用更久。
Fetch:其核心部件是一個可以反轉(back-Drivable)的7自由度機械臂,擁有高達6公斤的額定載荷,這個力量足夠應對實際典型倉儲中90%~95%的貨物。“Fetch” 長長的手臂能夠夠到從地板到將近兩米的高度,這意味著它可以基本上覆蓋人類的抓取范圍。其模塊化的抓取器擁有標準ISO接口,并配有以太網接口。“Fetch”頭部裝配有一個PrimeSense的3D感知器,可以上下左右轉動。頭部還有一系列空余接口,可以按需要裝配更多傳感器。基座有一個充電座,一個25米有效范圍的導航&避障SICK激光雷達,和一個差分驅動。
Freight:基本上就是把“Fetch”從腰部截斷剩下的部分。它配有相同的差分驅動和25米激光雷達。和“Fetch”相比,其最大優勢就是速度 ——現在它可以輕松達到2m/s,并且有可能沖到3m/s。“Freight”頂部有很多固定點,用戶可以把任何他認為合適的籃子放在上面。它可以承重70公斤,其實甚至可以更多。
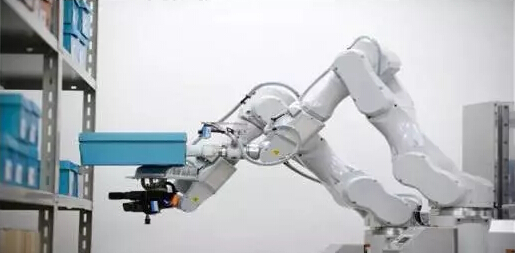
3.2 日立HITACHI智能機器人:實現在物流倉庫內移動并自動裝卸和搬運貨物
目前,在物流倉庫實際投入使用的搬運機器人能連續搬運同一形狀的紙箱等貨物。但是,從貨架上的箱子中取出特定貨物,或搬運多種形狀的物品在技術上仍有困難。日立開發的新型機器人采取的構造是,在移動平板車上安裝2個升降臺,然后分別裝上操作臂型的機器人。一條機械臂的頂端裝有吸附裝置,另一條頂端裝有2根機械手指。移動到指定貨架之后,調整升降臺高度,利用機械臂上安裝的攝像頭確認貨物,然后以符合其形狀和重量的方法拿起來。日立將建立在實際倉庫內能穩定運行的系統,首先在本公司的物流倉庫上使用,之后再考慮向其它公司出售。
例如,在取出箱中的PET瓶時,首先利用吸附裝置將貨架上的箱子移到近前,然后用2根手指抓住箱中的PET瓶并拿出來。如果是重量較大的物品,還會從下面托著進行搬運。從硬紙箱到1塊肥皂,新型機器人可處理各種大小和重量的貨物。
由于整體構造包括1臺平板車、2個升降臺和2條機械臂,總共5個裝置,因此能實現多樣化動作。但要相互協同工作,各個裝置之間需要通信聯動。平板車一邊利用智能傳感器測量與貨架之間的距離一邊行駛,但只在距離還剩1米、需要共同作業時才會向機械臂發出信號。通過減少通信量,提高了動作速度。從在貨架前停止到取出箱中物品,只需3秒即可完成。
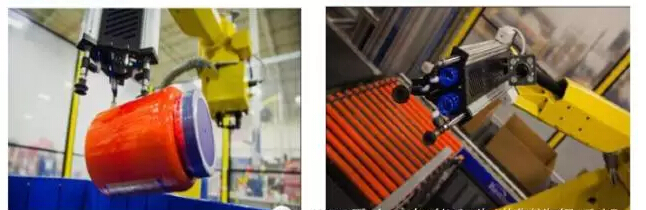
3.3 Bastian機器人:最新的貨到機器人電子履單系統
Bastian系統方案公司研發出最新的貨到機器人電子履單系統,Bastian機器人系統中集成了自動化存儲及選單系統、滑索式運輸機裝置,可揀選單個物品,功能強大,極大減少了運輸線上物品的揀選及運送時間,從而達到提高生產效率的目標。
Bastian機器人集成了一些先進的2-D和3-D視覺組件,有著靈活強健的機械手臂末端工具(EoAT),專門為貨到機器人(goods-to-robot)揀選解決方案而設計。該解決方案能夠對最復雜的成批產品進行揀選。系統能以模塊化方式設計,允許容易地引入新產品并由機器人進行鑒別。
工作原理:首先,一個裝有任意物品的貨品箱出現在3-D攝像系統中,在這一點上拍攝一系列照片繪制出物品的方位,就在一瞬間,機器人和視覺控制系統識別出“最可能的”揀選對象,釋放機器人進行選擇。一旦確定了目標對象,控制系統操縱機械臂和貨品箱內的EoAT,使用吸力或一個扣人心弦的技術來選擇一個物品,而不碰到其他物品或手提袋的四壁。此時機器人從箱子中縮回,把物品放到二級裝運箱,然后準備下一個物品揀選,并按順列排好。
主要優勢體現在:不需要上游分揀隨機箱裝的產品;縮短了從成堆商品中選擇物件的繁瑣耗時的過程;新引入的SKU快速模塊化編程;降低人工成本;提高訂單準確度;每小時揀選產品多達350個;無縫集成產品輸送機、托盤輸送機和AS/RS等輔助設備。擴展應用范圍廣,如將散裝物品成批運送到輸送機,為質量檢查選擇散裝的、不規則的物品,通過從多個箱子里挑選零件進行零件裝配等。