







文/本刊記者 葉兮
包裝行業不斷追求自動化和智能化,早期以人工為主的包裝工序顯然存在著效率和效益等多重問題,隨著機器人在包裝行業的滲透,從揀選、包裝到碼垛和搬運等多個環節都有了一定的自動化率。
目前,機器人在食品、飲料、日用品及化工行業包裝環節都有較多應用案例,從前段包裝到后段包裝,自動化生產線必將是未來探索的新模式,不少企業已經在這一領域有所動作。
揀選
揀選作業是由機器人來進行品種揀選,如果品種多,形狀各異,機器人需要帶有圖象識別系統和多功能機械手,機器人每到一種物品托盤就可根據圖象識別系統“看到”的物品形狀,采用與之相應的機械手抓取,然后放到搭配托盤上。
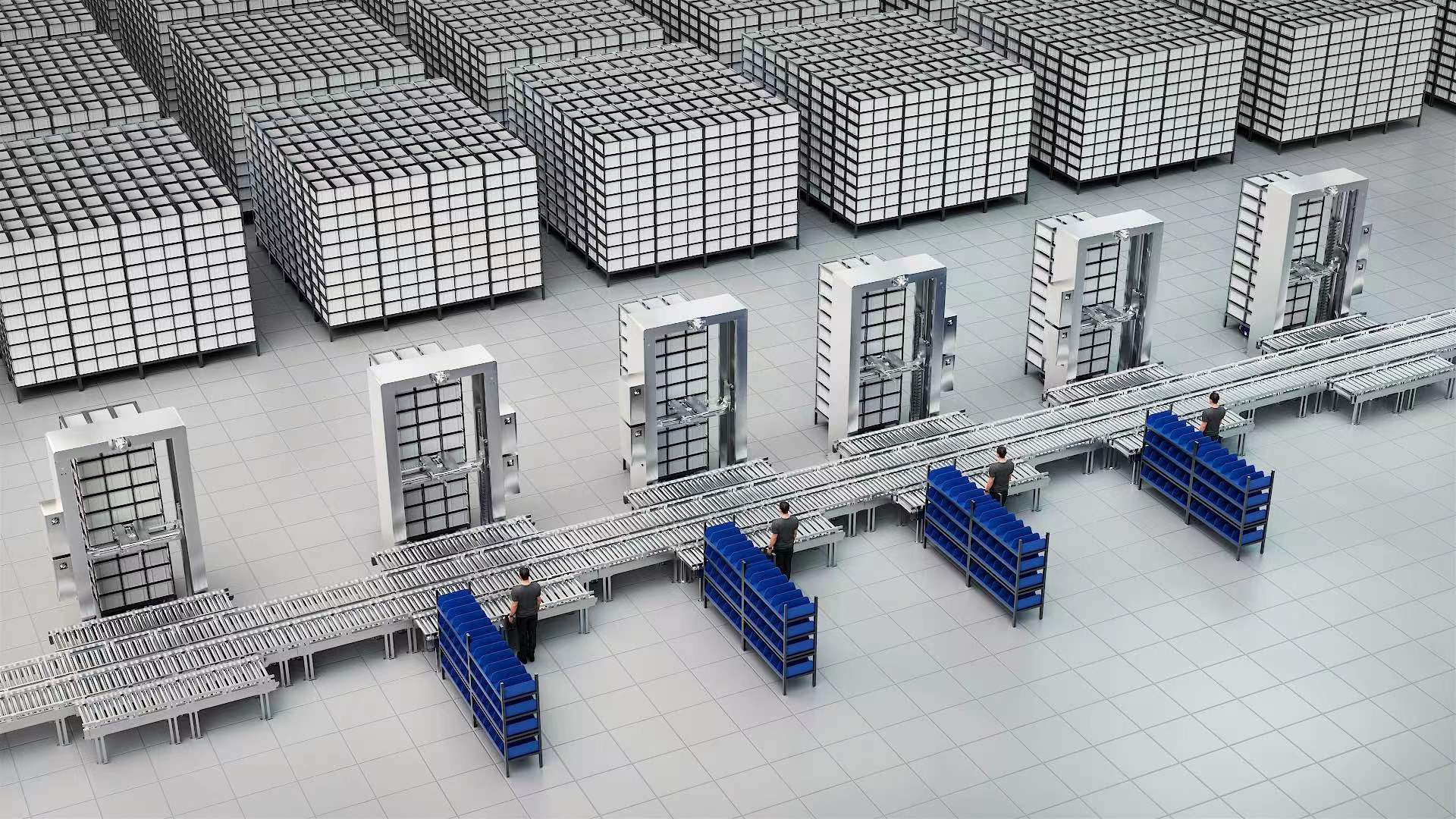
目前抓取分揀機器人在包裝行業應用不是很多,有部分企業在嘗試和研發生產中。未來,空無一人的倉庫,一臺臺機器人將貨架送到包裝臺,通過準確識別貨物,分揀出需要的商品,打包后放在傳輸帶上。這不是科幻電影,而是未來智能化的包裝分揀現場。
分揀機器人已經形成了樣機,一旦這些智能化的分揀機器人應用于包裝行業,將極大地提高倉儲管理的工作效率,壓縮人工成本。分揀機器人要進入市場仍需一段時間,短期內包裝揀選必然是以自動化與人工輔助的形式存在的。
當前,分揀機器人一般以并聯機器人為主,也就是所謂的蜘蛛手,通常是四軸,也有六軸并聯機器人。
并聯六軸機器人結構是發那科獨有的,這種設計可以使得這款機器人產品擁有很高的柔性。在工作中不僅可以隨意地變換物品的角度,更適用于整列、裝配等多種作業。據悉該產品配有適應復雜裝配作業的多軸手腕,靈活程度不亞于人類的手指,無論是分揀、標注,還是插取、搬運,它靈巧自如的手抓,流暢高效的作業,應用自如地為包裝行業的自動化生產提供了完善的解決方案。
包裝
在包裝行業,分揀的動作一般以效率為第一要求,而難度系數同樣較大的則是包裝,要把零散的物品準確放置在包裝袋或者包裝箱內,這不僅考驗機器人的靈活性和準確度,而且要求機器人具備視覺和可計算的功能。
產品包裝一般有多種形式,根據物件的形狀、材質、重量以及對潔凈度的要求,包裝程序較為復雜。比如集合包裝裝箱:一次將多個包裝件進行一次裝箱。粉料大袋的袋裝:一次性將粉料裝入特定軟袋中。高速的裝盒裝箱折邊封合多工位包裝:一些大型紙箱和托盤的多工位快速包裝,如將紙箱裝填完貨物后的折邊、壓邊、封合等。重物的搬運捆扎:靠人搬運難以實現的重型產品的包裝、搬運和捆扎。易脆物品的包裝:一次性將成組的瓶裝產品進行裝箱。有害液體的包裝化學和農藥等對人體有害液體的灌裝。識別和檢測:對一些包裝產品和包裝貨物在不同條件下,不同部位的自動識別和多種信息檢測,同時還具有分級和分類的功能。
目前包裝這一工序的機器人主要有以下幾種。裝袋機器人:裝袋機器人是機座固定回轉式,機身可360度旋轉,由機械手完成包裝袋的輸送、開袋、計量、充填、縫袋和給出堆碼。這是一種智能化較高的包裝機器人。裝箱機器人:類似裝袋機器人,一般金屬和玻璃包裝容器的裝箱用剛性包裝箱機器人完成。對裝箱包裝(物品)的抓取有機械式和氣吸式兩種。它可整體移動。對包裝件進行抓取或吸附,然后送人指定位置上的包裝箱或托盤中。它具有方向性和位置自動調節的功能,可實現無箱(托盤)不卸貨和方向調節。這類機器人是一種較為成熟的機器人,應用很廣。如飲料、啤酒,化妝品,香煙等。灌裝機器人:這是一種將包裝容器充滿液體物料后,進行計量、輸蓋、壓蓋(旋蓋)和識別的機器人。它具有無瓶不輸料、不蓋不輸瓶、破瓶報警和自動剔除等功能。在過去我們很多液體物料的灌裝主要是用這種機器人的局部功能一一機械手裝于生產線上,而今,已是將這種機器人直接配置在物料生產主機的后部,實現其自動灌裝。灌裝機器人有軟包裝和硬包裝之分。這里分析的是硬包裝(裝瓶)灌裝機器人。包裝輸送機器人: 這種機器人在包裝工業中主要指塑料瓶包裝輸送用的機器人,是利用動力和特殊的構件實現瓶體(空瓶)的輸送,將瓶桶中的包裝瓶單件快速輸出排列,然后給予一個特定(方向、大小)的力。使瓶體準確地在空中經過拋物線路線到達充填工件。這種機器人改變了傳統的輸瓶機構。使得輸送速度加快,輸送空間減小。是一種全新概念的包裝機器人。它借助于空氣動力學和特殊機械構件而實現其輸送作業的。
碼垛
隨著技術的進步和市場的需要,近年來,機器人碼垛取代傳統機械碼垛已是發展趨勢。并且由于國內企業的努力,國外碼垛機器人在我國市場一統天下的局面已經打破。碼垛機器人主要用于石油化工、飼料化肥、醫藥、建材(水泥)等行業,可以 減輕工人勞動強度, 特別是用于高危企業,確保安全生產。
機器人碼垛機是一種仿真人操作、自動操作、重復編程、在三維空間完成規定作業的設備,包括抓起和放置系統,能從一個或多個地點抓起一個或多個面袋,然后將它們放置到預先設置好的貨盤上。碼垛機器人具有很強的操作靈活性,一般位于生產線的后端,用來處理生產線上的物料,替代人工搬運碼垛,不僅大大提高生產效率和產量,同時也節省了費用。
碼垛作為包裝的重要環節之一,傳統的碼垛設備已經很難滿足各種復雜包裝的發展需求,以傳統碼垛設備為例,機械式碼垛機,具有占地面積大、程序更改復雜、耗電量大等缺點;采用人工搬運,勞動量大,工時多,無法保證碼垛質量,影響產品順利進入貨倉,可能有百分之五十的產品由于碼垛尺寸誤差過大而無法進行正常存儲,還需要重新整理。
碼垛機器人主要有直角坐標式機器人、關節式機器人和極坐標式機器人,碼垛機器人能適應于紙箱、袋裝、罐裝、箱體、瓶裝等各種形狀的包裝成品碼垛作業。
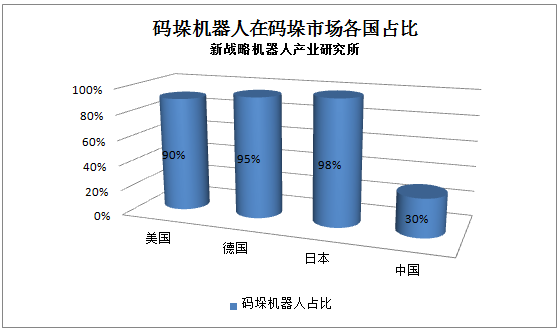
目前歐、美、日的碼垛機器人在碼垛市場的占有率超過了90%,絕大數碼垛作業由碼垛機器人完成。 從效率上說,碼垛機器人不僅能承擔高負重,而且速度和質量遠遠高于人工。以發那科目前四軸搬運機器人為例,根據負重的不同,分為160Kg、300Kg、450Kg、700Kg等型號。其在直線運動時可達到2500mm/s的最大運動速度;搬運能力最高能達到1500次/小時。從精度上看,每一臺碼垛機器人都有獨立的控制系統,極大地保證了作業精度,且重復精度可達±0.5mm,完全可以滿足物流碼垛作業的定位要求;從穩定性上講,目前最先進的碼垛機器人已經達到5軸和6軸,通過相應的科學、合理的剛性機械本體設計,使得機器人本體不僅適應高負重、高頻率的碼垛作業,還能適應食品快餐行業分揀繁瑣,靈活性高的作業要求。
搬運
搬運就是將包裝好的產品運輸到制定位置,通常這個位置離包裝地點有一定距離,因此移動搬運機器人成為運輸的好幫手。
AGV機器人是一種柔性化和智能化物流搬運機器人,在國外從50年代在倉儲業開始使用,目前已經在制造業、港口、碼頭等領域得到普遍應用,在國內逐漸也有部分企業重視并應用AGV來完成一些簡單的搬運任務。
AGV機器人在我國汽車、煙草、印鈔、新聞紙等行業已有大規模應用。其中,汽車制造業(主要是零部件制造)使用AGV機器人的占比最高,約占43%;其次是電力行業,應用占比13%;柴油發動機、煙草、乳品和飲料行業的應用分別占AGV總量的9%、6%和6%左右。
通常,搬運作為包裝的最后一個環節,主要連接成品和出貨的環節,因此,搬運機器人的具有靈活性的特點。對于包裝完成后的產品,搬運機器人完成了最后一公里的工作。
目前,包裝行業的機器人作業基本屬于工作站的形式,從分揀到包裝、碼垛乃至搬運全部由機器人完成不僅考驗著自動化生產線的技術布局,而且有較高成本壓力,況且,部分產品的部分工序尚難以用機器人完成,因此如何發揮機器人的高效性是一個值得長期探討的課題。


