









(日經(jīng)技術))安川電機開發(fā)出了在機器人模擬器上自動生成機器人動作軌道的“路徑規(guī)劃(Path Planning)功能”。通過使部分示教作業(yè)自動化,可減輕作業(yè)者的負擔,并縮短生產(chǎn)系統(tǒng)的設置時間及工序準備時間。
關于新功能,只要在安川電機的機器人模擬器“MotoSimEG-VRC”上輸入動作開始姿勢、結束姿勢及動作生成條件,就會自動生成可避開周圍障礙物的軌道(圖1)。即使是示教難度大的雙腕機器人,也可輕松生成左右臂不會碰撞的軌道。
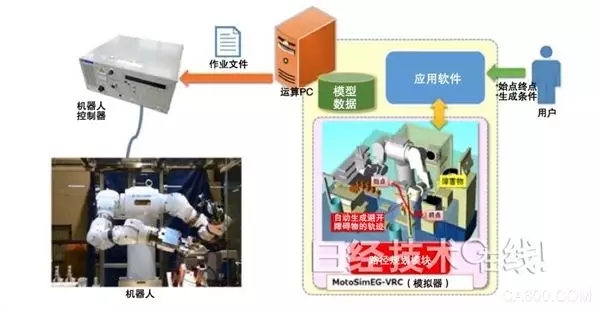
生成的軌道通過安川電機的機器人編程語言轉換為機器人動作,因此可實現(xiàn)高速、高精度的示教再現(xiàn)。由于是在確保機器人與障礙物之間任意空間的同時生成節(jié)拍短的動作,因此還可應對模擬與實際環(huán)境存在誤差的情況。另外,還可生成使機器人握持工件的姿勢保持固定的軌道,因此還可滿足液體搬運系統(tǒng)的使用要求。
具體用途方面,可用于部件配給系統(tǒng)(圖2)。通過使新功能與3D形狀識別功能、自動生成握持及換手動作的功能相融合,每次都會自動生成動作程序。這樣便可縮短節(jié)拍時間。

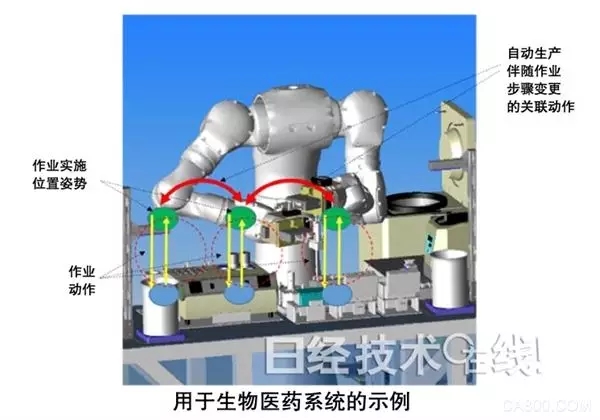
其他用途還有在醫(yī)藥開發(fā)、制藥及臨床檢查領域使用的機器人系統(tǒng)(圖3)。在該研究領域,實驗作業(yè)步驟會頻繁改變,每次都必須變更機器人的動作程序。而使用新功能時,即使沒有機器人專家也可變更程序。而且,緊急停止時的復位動作也可自動執(zhí)行。
安川電機將在2016年6月15~17日舉行的“機器人產(chǎn)業(yè)對接展北九州”上,展出嵌入路徑規(guī)劃功能的部件配給系統(tǒng)。
延伸閱讀:移動機器人路徑規(guī)劃算法研究成果
實際上,移動機器人的路徑規(guī)劃方法是基于不同的環(huán)境和具體的移動機器人控制體系結構的,在差異較大的環(huán)境中對于性能不同的移動機器人來說,不同的路徑規(guī)劃方法各有自己的優(yōu)勢與劣勢。目前還沒有一種規(guī)劃方法適合各種環(huán)境任何系統(tǒng),并且有時候選擇不同的規(guī)劃方法結合雙方的優(yōu)點可以取得更好的規(guī)劃效果。
成果一:機器人路徑規(guī)劃算法部分
在2011年12月—2011年3月期間,我們對不同的路徑規(guī)劃算法進行了研究,并且利用Matlab軟件對其進行編程仿真,并且我們對仿真結果,進行了數(shù)據(jù)分析和研究,對不同的算法進行了對比,提出了各自的優(yōu)缺點。下面我們選取幾種已經(jīng)做好的算法進行成果展示,分別為A*算法、人工勢場算法等。并且我們又進一步實現(xiàn)了避障及導航線循跡算法,為以后的研究工作奠定了基礎。
附錄為A*算法的流程,對于其他算法的模型及流程,詳見各開發(fā)文檔。
1、A*算法matlab仿真結果
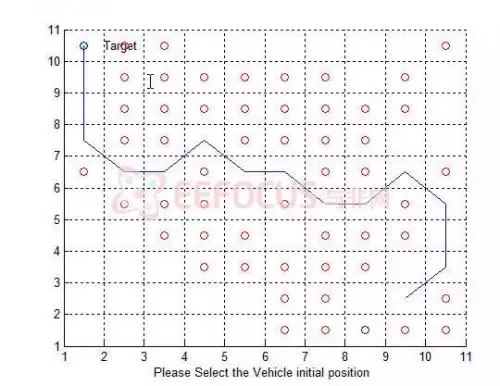
上圖為采用A*算法的路徑規(guī)劃結果。圖中紅色圓點表示障礙物,藍色圓點表示起始點。由圖可以看出,A*算法的規(guī)劃效果比較
2、人工勢場算法matlab仿真結果
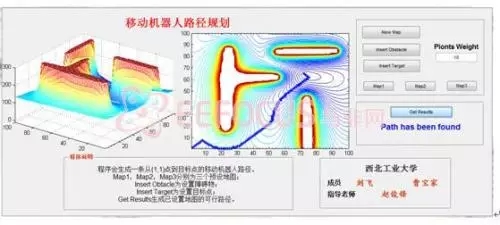
人工勢場法的基本原理就是在機器人所處離散環(huán)境中的每一點賦一個勢場值,的值是目標點的引力和障礙物的斥力的疊加。
和是距離影響因子,為與目標的距離,為與障礙物的距離。因此機器人的路徑規(guī)劃就是從起始點沿著勢場最快下降的方向達到目標點。
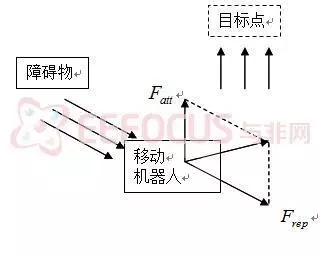
人工勢場受力模型圖
該方法的優(yōu)點是在數(shù)學描述上簡潔,可以使機器人迅速躲開突發(fā)障礙物,實時性好,因而經(jīng)常被用于局部路徑規(guī)劃的設計。
但是人工勢場法的缺點也比較多:
如下圖所示,會產(chǎn)生錯誤的結果:
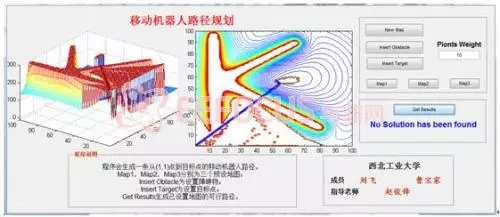
1、存在陷阱區(qū)域:就是在路徑規(guī)劃中經(jīng)常會碰到局部極值點,也就是引力和斥力相等,合力為零的點,從而使機器人運動到一個死區(qū),導致規(guī)劃失敗。
2、當目標點附近有障礙物時,智能機器人將永遠也到達不了目的地。在以往的一些研究中,目標點和障礙物都離得很遠,當機器人逼近目標點時,障礙物的斥力變的很小,甚至可以忽略,機器人將只受到吸引力的作用而直達目標。但在許多實際環(huán)境中,往往至少有一個障礙物與目標點離得很近,在這種情況下,在智能機器人逼近目標的同時,它也將向障礙物靠近,由于引力場函數(shù)和斥力場函數(shù)的定義,斥力將比引力大得多,這樣目標點將不是整個勢場的全局最小點,因此智能機器人將可能達不到目標。
3、在障礙物密集的區(qū)域會產(chǎn)生震蕩,從而無法完成路徑規(guī)劃。
4、在連續(xù)狹窄的障礙物通道中擺動,或是無法發(fā)現(xiàn)路徑。
成果二:智能小車(基于攝像頭)導航
從2010年12月至2011年3月,我們設計并且制作了智能小車(AGV),用以完成該項目的導航線路徑規(guī)劃部分。目前,我們已經(jīng)將智能小車設計并組裝完畢。并且已經(jīng)完成了部分軟件設計。目前小車能夠通過攝像頭采取到如下(第3部分)圖片。使小車能夠循線行駛。并且能將各傳感器信息進行融合,從而達到較好的導航效果。下面我將從三個方面進行成果展示,其一為賽道舉例,其二為硬件電路設計,其三為攝像頭采集圖片示例。
賽道舉例
硬件電路設計
驅動電路模塊,利用以下驅動電路實現(xiàn),利用兩個BTS7960芯片,BTS7960是半橋驅動芯片,就是說需要2個芯片來驅動一個電機,電流最高43A,其內阻很小,所以散熱不是很厲害。電機的控制芯片。一般情況下用的有33886或者是BTS7960控制芯片,前者是電路中的全橋控制電路,就是說一片就可以完成變速和正轉與反轉。而后者是半橋控制電路,就是說一片只能完成變速,但是不能完成轉向的切換,若需要換向時,可用兩片BTS7960搭接成全橋電路即可。其工作原理是由主控制芯片(一般情況下為單片機)根據(jù)加速或減速以及正轉或反轉的信息產(chǎn)生相應的PWM波形,而該PWM波形將會送人電機控制芯片,電機控制芯片將會產(chǎn)生相應的響應來改變電機兩端的電壓,從而實現(xiàn)變壓調速。


