








文/新戰(zhàn)略機器人全媒體記者 葉兮
近來,工業(yè)機器人控制系統(tǒng)出現(xiàn)了多種新興技術(shù),尤其是“驅(qū)控一體化”更是成為熱議。其實,驅(qū)控一體化技術(shù)并非是機器人行業(yè)獨創(chuàng),但是在工業(yè)機器人領(lǐng)域是否是一種變革式的創(chuàng)舉,是否能夠為國產(chǎn)工業(yè)機器人帶來更多便利性和高性價比,成為業(yè)界關(guān)注的焦點。
作為國產(chǎn)控制器的領(lǐng)先企業(yè),眾為興在驅(qū)控一體化技術(shù)上有較高發(fā)言權(quán),眾為興將根據(jù)多年應(yīng)用和本體開發(fā)經(jīng)驗為我們解答驅(qū)控一體化的必然性。
驅(qū)控一體系統(tǒng)在機器人領(lǐng)域的應(yīng)用
驅(qū)控一體系統(tǒng)是一款專門針對小型桌面機器人而開發(fā)的智能機器人控制系統(tǒng),它巧妙地將伺服驅(qū)動技術(shù)、運動控制技術(shù)和機器視覺技術(shù)融合在一臺機器上,通過內(nèi)部高速并行總線進行信息交換,充分滿足細分行業(yè)的應(yīng)用定制和工藝定制要求,目前驅(qū)控一體已在多個細分行業(yè)中實現(xiàn)應(yīng)用,下文以四軸SCARA機器人在3C產(chǎn)業(yè)的應(yīng)用為例對這個項目進行介紹。
1迷你化機身設(shè)計
3C產(chǎn)業(yè)發(fā)展迅猛,其產(chǎn)品生產(chǎn)具有輕載多量的特點,這就對機械手提出了新的要求。為了能夠適應(yīng)小型流水線作業(yè),機械手必須變得足夠輕巧,而對應(yīng)的控制系統(tǒng)也必須滿足這個條件。眾為興驅(qū)控一體系統(tǒng)的設(shè)計理念是:設(shè)計最“合適的”系統(tǒng),然后做到足夠的小,小到可以忽略它的存在,同時兼顧性能最優(yōu)化。如何實現(xiàn)這一點呢?最主要的一個原因是它采用了內(nèi)部并行總線的方式替代繁瑣的外部接線,通過內(nèi)部板載走線,是普通的總線網(wǎng)絡(luò)23倍的數(shù)據(jù)吞吐量。此外,驅(qū)控一體化技術(shù)不單數(shù)據(jù)總線是并行的,同步時鐘線也是并行的,同步時鐘的抖動完全靠FPGA晶振的精度和芯片電氣的延時決定,輕輕松松就可以達到納秒級別。

2專業(yè)的運動控制技術(shù)
與傳統(tǒng)市場相比,3C行業(yè)機器人對細微技術(shù)處理、柔性化以及集成化等方面要求更高。QC驅(qū)控一體系統(tǒng)融合了眾為興DSP運動控制卡技術(shù),可以實現(xiàn)各種直線和圓弧插補,樣條教導(dǎo),軌跡跟隨,速度前瞻,T、E、S、C型加減速模式等功能,讓機器人運動更加穩(wěn)健平滑。
2.1 分布式CPU
和傳統(tǒng)的控制平臺不同,驅(qū)控一體系統(tǒng)并沒有考慮x86的PC Base方案,這是因為雖然電腦越來越高速,但要真正做到工業(yè)現(xiàn)場安全、實時的要求,基于x86的平臺并不能很好的保證這一點,例如一臺雙核的2G主頻CPU,無法保證100μs中斷,1μs的延遲抖動。
驅(qū)控一體系統(tǒng)采用了分布式CPU架構(gòu),使得硬件各盡其職。分布式CPU架構(gòu)從實時角度上來說,一個CPU干一件事就是一種硬實時,保證了方案的可靠性。此外它還有效地利用了嵌入式CPU的特性來發(fā)揮系統(tǒng)的高效性,如FPGA適合做高頻的邏輯處理,ARM適合做人機交互,DSP適合做算法運算等,各自發(fā)揮各自的特長,從而保證整體的性能更優(yōu)。
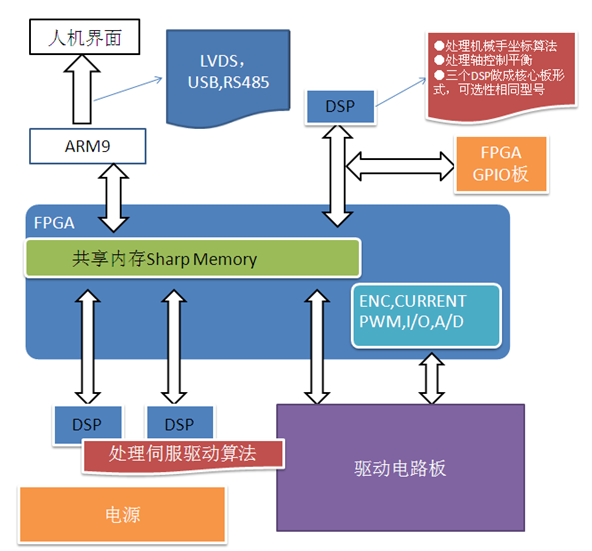
圖二QC系列分布式CPU分布示意圖
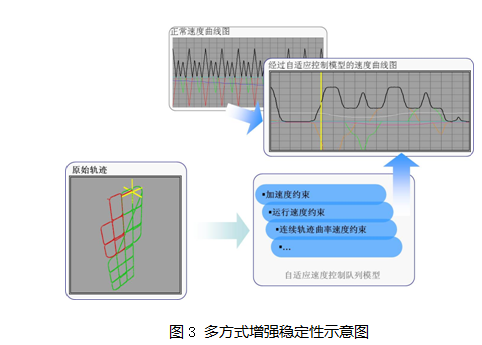
2.2多方式增強穩(wěn)定性
(1)速度自適應(yīng):實際應(yīng)用中,存在很多不規(guī)則運動, 驅(qū)控一體系統(tǒng)提出了一個自適應(yīng)速度控制隊列模型,通過對各種約束條件的判斷來計算出一個合理的速度銜接值,從而無需做減速也能實現(xiàn)速度連貫。
(2)位置速度前瞻:伺服在急速加減速時也會產(chǎn)生大的震動,導(dǎo)致誤差加大,驅(qū)控一體系統(tǒng)通過預(yù)知速度變化信息,推算軸轉(zhuǎn)矩變化,動態(tài)送入伺服電流環(huán)來控制誤差;
(3)實時計算慣量:驅(qū)控一體系統(tǒng)可以實時獲取各關(guān)節(jié)的扭力變化,使機器人一些控制算法可以發(fā)生改變,例如現(xiàn)在研究中的機器人動力學(xué),柔性機器人運動控制等。
2.3可編程
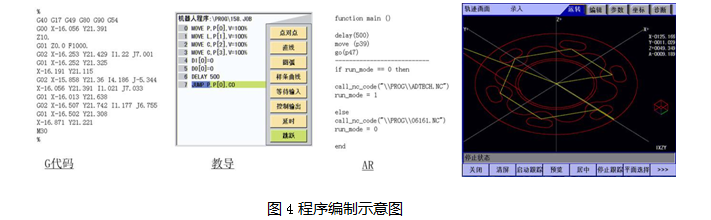
(1)QC驅(qū)控一體系統(tǒng)擁有海量存儲空間,支持教導(dǎo)、G代碼、AR等開發(fā)方式,讓無論是編寫PLC、數(shù)控機床、還是C/C++的工程師,都能夠選擇自己熟悉的開發(fā)方式,大大縮短了開發(fā)時間;
(2)支持在線、離線三維軌跡仿真,提高機器人現(xiàn)場應(yīng)用的安全性。
3 世界前沿的伺服驅(qū)動技術(shù)
QC驅(qū)控一體系統(tǒng)融合了眾為興QX伺服驅(qū)動技術(shù)。QX伺服驅(qū)動器是眾為興經(jīng)過四年不斷探索,分析比較了國內(nèi)外各品牌的伺服驅(qū)動產(chǎn)品,引進國際前沿技術(shù),開發(fā)出來的國產(chǎn)高端伺服驅(qū)動產(chǎn)品,其性能已達國際先進水平。QX與QC的完美結(jié)合,滿足工業(yè)機器人在3C等精細化產(chǎn)業(yè)的高速、高精等要求。
3.1兼容性強
不同種類的機器人對電機的要求也不一樣,對于控制系統(tǒng)而言,電機的選擇尤為重要,眾為興QC驅(qū)控一體系統(tǒng)通過支持不同的編碼器來有效解決電機選擇問題。
(1)編碼器可選擇性:目前編碼器的通訊并沒有統(tǒng)一的格式,而是由各大編碼器廠家自定協(xié)議,市面上主要的高分辨率編碼器廠家有日本的松下、尼康、多摩川等品牌。QC驅(qū)控一體系統(tǒng)可以支持這些品牌編碼器。
(2)電機可選擇性: QC驅(qū)控一體系統(tǒng)的開放性滿足客戶在不同應(yīng)用場合電機性能的選型需求,不僅支持眾為興系列電機,還支持山洋、多摩川、松下等電機。
3.2 高速、高精度響應(yīng)
伺服的精度來源于編碼器和位置環(huán)的響應(yīng)頻率。
從編碼器角度上來說,QC驅(qū)控一體系統(tǒng)通過支持不同編碼器的協(xié)議,進而獲取高分辨率的控制,例如配合松下20位的絕對式伺服馬達,控制分辨率能達到一百萬分之一圈(1/1048576),精度相當(dāng)高。
而要達到高速下的高精,就要靠伺服的位置環(huán)刷新周期了。由于是驅(qū)控一體化的結(jié)果,伺服的位置環(huán)刷新周期可以簡單理解為插補周期,以QC為例,最高可以做到16k,以10米/分鐘的速度來算,16K插補周期的插補軸控制精度可以做到0.01mm插補精度,真正意義上的高速高精。這是驅(qū)控一體化技術(shù)的優(yōu)勢,因為16k刷新率只有在內(nèi)部高速總線上才能輕松實現(xiàn)。
3.3 可視化數(shù)據(jù)采集
傳統(tǒng)伺服通過脈沖或模擬量的方式與控制器連接,控制器只能獲得位置信息。QC驅(qū)控一體系統(tǒng)具有現(xiàn)場總線通訊的優(yōu)越性,能實時獲取伺服驅(qū)動器位置、速度、電流、加速度等參數(shù),同時通過驅(qū)控調(diào)試軟件,可實時監(jiān)控多個伺服驅(qū)動器的運行信息,比如電流、速度、位置大小以及跟隨狀態(tài)等,并以波形的形式呈現(xiàn)參數(shù)變化趨勢。
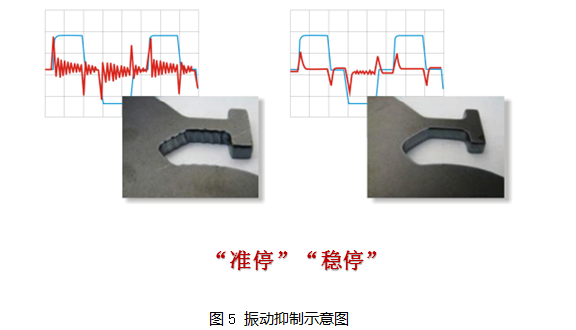
3.4 振動抑制
在需要實現(xiàn)高精度制造的場合比如手機裝配、電路板焊接、精密儀器加工等,振動抑制顯得尤為重要。這不是速度環(huán)和位置環(huán)的調(diào)整能解決的,需要在控制方法上有所革新,QC系列驅(qū)控一體系統(tǒng)通過兩套方案來實現(xiàn)振動抑制:
(1)平臺振動抑制:通過陷波濾波實現(xiàn)機械高/低共振抑制;
(2)末端振動抑制:通過反向疊加算法,實現(xiàn)末端振動抑制。
3 世界前沿的伺服驅(qū)動技術(shù)
QC驅(qū)控一體系統(tǒng)融合了眾為興QX伺服驅(qū)動技術(shù)。QX伺服驅(qū)動器是眾為興經(jīng)過四年不斷探索,分析比較了國內(nèi)外各品牌的伺服驅(qū)動產(chǎn)品,引進國際前沿技術(shù),開發(fā)出來的國產(chǎn)高端伺服驅(qū)動產(chǎn)品,其性能已達國際先進水平。QX與QC的完美結(jié)合,滿足工業(yè)機器人在3C等精細化產(chǎn)業(yè)的高速、高精等要求。
3.1兼容性強
不同種類的機器人對電機的要求也不一樣,對于控制系統(tǒng)而言,電機的選擇尤為重要,眾為興QC驅(qū)控一體系統(tǒng)通過支持不同的編碼器來有效解決電機選擇問題。
(1)編碼器可選擇性:目前編碼器的通訊并沒有統(tǒng)一的格式,而是由各大編碼器廠家自定協(xié)議,市面上主要的高分辨率編碼器廠家有日本的松下、尼康、多摩川等品牌。QC驅(qū)控一體系統(tǒng)可以支持這些品牌編碼器。
(2)電機可選擇性: QC驅(qū)控一體系統(tǒng)的開放性滿足客戶在不同應(yīng)用場合電機性能的選型需求,不僅支持眾為興系列電機,還支持山洋、多摩川、松下等電機。
3.2 高速、高精度響應(yīng)
伺服的精度來源于編碼器和位置環(huán)的響應(yīng)頻率。
從編碼器角度上來說,QC驅(qū)控一體系統(tǒng)通過支持不同編碼器的協(xié)議,進而獲取高分辨率的控制,例如配合松下20位的絕對式伺服馬達,控制分辨率能達到一百萬分之一圈(1/1048576),精度相當(dāng)高。
而要達到高速下的高精,就要靠伺服的位置環(huán)刷新周期了。由于是驅(qū)控一體化的結(jié)果,伺服的位置環(huán)刷新周期可以簡單理解為插補周期,以QC為例,最高可以做到16k,以10米/分鐘的速度來算,16K插補周期的插補軸控制精度可以做到0.01mm插補精度,真正意義上的高速高精。這是驅(qū)控一體化技術(shù)的優(yōu)勢,因為16k刷新率只有在內(nèi)部高速總線上才能輕松實現(xiàn)。
3.3 可視化數(shù)據(jù)采集
傳統(tǒng)伺服通過脈沖或模擬量的方式與控制器連接,控制器只能獲得位置信息。QC驅(qū)控一體系統(tǒng)具有現(xiàn)場總線通訊的優(yōu)越性,能實時獲取伺服驅(qū)動器位置、速度、電流、加速度等參數(shù),同時通過驅(qū)控調(diào)試軟件,可實時監(jiān)控多個伺服驅(qū)動器的運行信息,比如電流、速度、位置大小以及跟隨狀態(tài)等,并以波形的形式呈現(xiàn)參數(shù)變化趨勢。
3.4 振動抑制
在需要實現(xiàn)高精度制造的場合比如手機裝配、電路板焊接、精密儀器加工等,振動抑制顯得尤為重要。這不是速度環(huán)和位置環(huán)的調(diào)整能解決的,需要在控制方法上有所革新,QC系列驅(qū)控一體系統(tǒng)通過兩套方案來實現(xiàn)振動抑制:
(1)平臺振動抑制:通過陷波濾波實現(xiàn)機械高/低共振抑制;
(2)末端振動抑制:通過反向疊加算法,實現(xiàn)末端振動抑制。
4機器視覺通訊
QC驅(qū)控一體系統(tǒng)集成眾為興多來在視覺控制領(lǐng)域的研究成果,使驅(qū)控一體配合視覺時更具兼容性和便利性。
(1)直接九點標(biāo)定接受像素坐標(biāo),對視覺的選擇兼容性更強;
(2)三點標(biāo)定法,可以快速建立一個和視覺坐標(biāo)相匹配的機器人坐標(biāo)系,試用更便利。

以上可以看出,QC系列驅(qū)控一體化系統(tǒng)是從最終產(chǎn)品的角度著手,結(jié)合細分行業(yè)的特性進行運動控制產(chǎn)品的定位和設(shè)計,配合不斷豐富的適用于不同應(yīng)用工藝的軟件包,來促進機器人在各領(lǐng)域的廣泛應(yīng)用。
當(dāng)前,驅(qū)控一體化技術(shù)是工業(yè)機器人發(fā)展的潮流和趨勢,其是否能被機器人企業(yè)廣泛的驗證和接受,眾為興將在未來的實際應(yīng)用中做出詮釋。


