








2017年7月5日,2017第6屆中國國際機(jī)器人展覽會CIROS2017在上海國家會展中心3H、NH館盛大開幕,作為高品質(zhì)國產(chǎn)機(jī)器人的代表,新時達(dá)機(jī)器人攜多款先進(jìn)產(chǎn)品和前沿技術(shù)驚艷亮相。
CIROS中國國際機(jī)器人展覽會由中國機(jī)械工業(yè)聯(lián)合會CMIF、中國機(jī)器人產(chǎn)業(yè)聯(lián)盟CRIA、上海中機(jī)聯(lián)展覽有限公司CMEPO聯(lián)合主辦,是中國目前機(jī)器人領(lǐng)域規(guī)模最大、行業(yè)影響力最強(qiáng)的專業(yè)展覽會。
在這里,小新把新時達(dá)機(jī)器人部分精彩展品向大家做簡要介紹,沒機(jī)會到現(xiàn)場參觀的朋友們可以一飽眼福啦......
展品描述:
FDS自制的輕質(zhì)自攻螺釘和鉚釘充分利用螺釘自攻時產(chǎn)生的熱量,形成緊密連接接頭,防止部件銹蝕,大大提升鉚接的強(qiáng)度。
FDS螺栓擰緊技術(shù)是代替焊接,固定和連接車身的新型技術(shù),目前鋁車身中大量使用該工藝。
技術(shù)亮點(diǎn):
機(jī)械強(qiáng)度高(螺紋咬合圈數(shù)多)節(jié)能環(huán)保,螺絲形成無廢屑重疊孔、定位孔及無孔位可組裝可以全自動安裝,裝配成本低
適用工件材質(zhì):
碳鋼、不銹鋼、鋁、黃銅、磁性材料、特殊金屬等
鋼板4mm;鋁板6mm
行業(yè)應(yīng)用:
汽車、家電、船舶、機(jī)床、農(nóng)機(jī)、家具、新能源等

展品描述:
SRC2.6C緊湊型機(jī)器人控制箱,將4路IPM模塊集成于一體,極大地減小了驅(qū)動器的安裝空間,更好滿足客戶對空間的需求。
采用共直流母線方式,在有效提升控制系統(tǒng)效率的同時,更加高效地控制扭力輸出。
機(jī)器人末端加裝六維力/力矩傳感器實現(xiàn)機(jī)器人的拖動示教功能,簡單、快速地實現(xiàn)機(jī)器人編程要求。
技術(shù)亮點(diǎn):
超強(qiáng)的速度響應(yīng)能力,速度環(huán)帶寬高達(dá)2.0kHz
負(fù)載轉(zhuǎn)矩觀測、離線觀察辨識、高低頻震蕩抑制、自抗擾控制等強(qiáng)大功能
支持EtherCAT總線協(xié)議,支持單節(jié)點(diǎn)多軸同步驅(qū)動
全程防碰撞功能,可實現(xiàn)碰撞后快速停止
行業(yè)應(yīng)用:
該控制系統(tǒng)可搭載新時達(dá)SA1400、SD500、SD700機(jī)器人,適用于3C裝配、工件焊接、解碼跺及機(jī)床上下料等
先進(jìn)焊接功能演示工作站

展品描述:
最新開發(fā)的間斷焊功能包,使機(jī)器人在焊接過程中,可周期性地起弧、前進(jìn)、停止、收弧、焊接漸變。
可實現(xiàn)全位置焊接,熱輸入低,焊縫呈魚鱗紋,成型非常美觀,可滿足車架等薄板焊接需要。
技術(shù)亮點(diǎn):
工件放置不受限制,平放、直放、斜放均可,單位時間工件所受局部熱量小,可有效減小工件變形,焊縫成型可靠且美觀人機(jī)界面友好,編程方便
行業(yè)應(yīng)用:
車架、五金件等薄板焊接

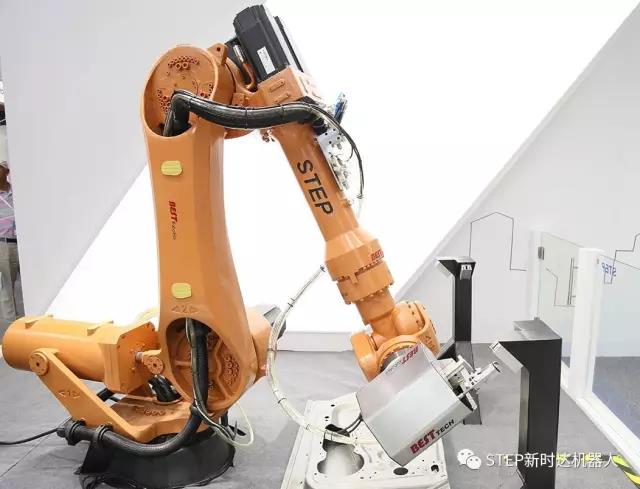
展品描述:
利用六維力/力矩傳感器設(shè)計阻抗控制算法使機(jī)器人末端柔順化,在裝配、打磨等與外界接觸的加工場合中,使用此方法可控制接觸力的變化,避免硬接觸造成物體損壞。
在此基礎(chǔ)上,設(shè)計搜孔算法,或者打磨軌跡自適應(yīng)算法,可有效補(bǔ)償示教誤差,讓工件示教更加簡單,裝配和打磨過程更加智能化。
裝配過程中允許孔的位置存在相對變動,機(jī)器人能夠自動找準(zhǔn)安裝位,以此應(yīng)對環(huán)境變化或工件制造過程中的未知誤差,確保機(jī)器人及裝配工件的安全。
技術(shù)亮點(diǎn):
精確控制機(jī)器人與工件之間的接觸力
降低了對孔位位置的一致性要求
降低示教難度
保證工件在裝配過程中不會變形、損壞
行業(yè)應(yīng)用:
裝配、打磨、解碼跺
機(jī)器人視覺應(yīng)用平臺

展品描述
兩臺眾為興AR4215機(jī)器人配合視覺相機(jī)用于不同形狀物料的識別、定位和取放。
物料由兩條皮帶線進(jìn)行輸送并結(jié)合機(jī)器人實現(xiàn)循環(huán)流動,其中一臺機(jī)器人配合相機(jī)對皮帶線上物料進(jìn)行動態(tài)跟隨取放,另一臺機(jī)器人配合傳感器對另一皮帶線上物料進(jìn)行抓取和配合相機(jī)做二次定位和識別,區(qū)分不同物料、精確放置并穿過對應(yīng)物料孔位。
工序說明
皮帶線A上傳感器感應(yīng)到導(dǎo)流位置上有物料后,機(jī)器人A從導(dǎo)流位置抓取物料,移送到相機(jī)出識別物料形狀并精確定位,然后機(jī)器人把物料精確移送到皮帶線B上方相應(yīng)物料的放置位置進(jìn)行放置通過。
物料通過放置位置后由皮帶線B往前輸送,機(jī)器人B配合相機(jī)進(jìn)行動態(tài)跟隨并抓取放置到皮帶線A上,物料通過皮帶線A輸送最后回到導(dǎo)流位置被感應(yīng)器感應(yīng)到,繼續(xù)下一個循環(huán)。
【免責(zé)聲明】所刊原創(chuàng)內(nèi)容之本文僅代表作者本人觀點(diǎn),與新戰(zhàn)略機(jī)器人網(wǎng)無關(guān)。新戰(zhàn)略機(jī)器人網(wǎng)站對文中陳述、觀點(diǎn)判斷保持中立。本網(wǎng)轉(zhuǎn)載自其它媒體的信息,轉(zhuǎn)載目的在于傳遞更多信息,并不代表本網(wǎng)贊同其觀點(diǎn)和對其真實性負(fù)責(zé)。
【版權(quán)聲明】凡本網(wǎng)注明“來源:xzl機(jī)器人”的所有作品,著作權(quán)屬于新戰(zhàn)略機(jī)器人網(wǎng)站所有,未經(jīng)本站之同意或授權(quán),任何人不得以任何形式重制、轉(zhuǎn)載、散布、引用、變更、播送或出版該內(nèi)容之全部或局部,亦不得有其他任何違反本站著作權(quán)之行為。違反上述聲明者,本網(wǎng)將追究其相關(guān)法律責(zé)任。轉(zhuǎn)載、散布、引用須注明原文來源。


