








文/《物流搬運機器人》 熙文

圖:斯坦德機器人副總經(jīng)理 梁成剛
數(shù)據(jù)顯示,與發(fā)達國家相比,單位GDP中我國的倉儲成本占比是發(fā)達國家的 2 - 3 倍之高,對倉儲業(yè)進行成本控制將是一個長期存在的目標,在此需求下,智能倉儲搬運機器人成為了降低運營成本的一大選擇,最為知名的當屬 Amazon 收購 Kiva、菜鳥投資快倉等。來自 Tractica 的研究數(shù)據(jù)顯示,至 2021 年全球倉儲和物流機器人的市場規(guī)模將達到 224 億美元,行業(yè)整體的未來發(fā)展空間廣闊。
斯坦德在室內(nèi)和室外兩大領(lǐng)域主推工廠搬運機器人及室外巡檢機器人。室內(nèi)搬運機器人主攻工業(yè)場景,三大優(yōu)勢明顯,第一選擇無軌導(dǎo)航方案;第二完全自主開發(fā)的運動控制系統(tǒng);第三創(chuàng)新的FMS軟件系統(tǒng)。核心部分主攻兩個方面,一是開發(fā)SLAM定位、信標定位、慣性導(dǎo)航、運動控制等底層技術(shù);二是在上述基礎(chǔ)之上進行產(chǎn)品開發(fā)應(yīng)用。因此當前其業(yè)務(wù)模式主要為整機銷售以及提供AGV技術(shù)解決方案。
系統(tǒng)軟件方面,斯坦德機器人研發(fā)的FMS系統(tǒng)(機器人任務(wù)部署及調(diào)度系統(tǒng))。AGV調(diào)度系統(tǒng)通過與客戶的MES/WMS信息交互,獲取搬運任務(wù)指令,然后將任務(wù)信息分配給調(diào)度系統(tǒng)所轄的AGV小車,從而實際貨物的搬運;調(diào)度系統(tǒng)實時顯示各AGV的位置信息及任務(wù)狀態(tài),便于AGV的監(jiān)控和管理;調(diào)度系統(tǒng)可以同時調(diào)度1000臺機器人協(xié)同工作,系統(tǒng)兼容不同類型的AGV,實現(xiàn)工廠的集中管理及大規(guī)模集群。
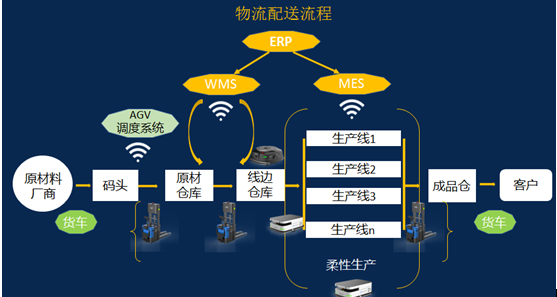
當前,智能物流的關(guān)鍵問題在于追求總體物流的平衡,而不僅僅是局部能力提升。因此,當生產(chǎn)車間的各種叉車、輸送線、提升機、堆垛機、機械手、AGV等硬件設(shè)備需要協(xié)同執(zhí)行任務(wù)時,AMS自動化管理系統(tǒng)就起到了關(guān)鍵作用。
以工業(yè)搬運類AGV為例,不同于 Kiva 這類機器人,斯坦德機器人應(yīng)用場景和導(dǎo)航方案均有所不同,前者由于應(yīng)用在較為封閉的無人倉庫中,環(huán)境較單一,因而路徑導(dǎo)航采用的是傳統(tǒng)的地表點陣式二維碼(可理解為固定線路的搬運),安全防護等級也較低。

而斯坦德機器人服務(wù)更上游的工業(yè)場景,主要有工廠內(nèi)部原料庫、備料庫、制成品庫的出入庫,包括搬運和碼放,以及生產(chǎn)線材料的配送、在制品的流轉(zhuǎn)等。因此相比于分揀倉庫內(nèi)部“貨到人”的場景,這些工廠里使用環(huán)境更為復(fù)雜,要求的安全等級更高,而且地標在該場景下極易受損。


