








今天咱們就來(lái)一起了解一下ASIMO吧

Asimo是另一種完全不同風(fēng)格的機(jī)器人
它是全球最早具備人類雙足行走能力的類人型機(jī)器人
2016年全球機(jī)器人排名Asimo當(dāng)屬第一

Asimo是由日本本田技研工業(yè)株式會(huì)社研制
2000年Asimo首次亮相
18年前可以直立行走
對(duì)科技界來(lái)說(shuō)已經(jīng)是個(gè)不小的驚喜
但是你不知道的是
這個(gè)驚喜其實(shí)是經(jīng)過了很多年的積累
悉數(shù)一番你會(huì)從中看到每一點(diǎn)的科技進(jìn)步
而今天的Atlas機(jī)器人的三連跳
也得益于前人的“種樹”
才有了今天的“綠蔭”
Asimo家族
↓↓

ASIMO 的研發(fā)始于1986年
當(dāng)時(shí)只是一個(gè)代號(hào)叫E0 的雙腿平衡機(jī)器人
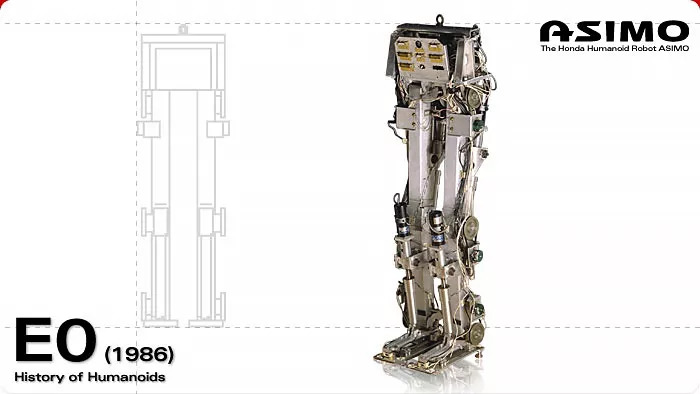
E0首次運(yùn)用了雙足步行的原理
根據(jù)直線的靜態(tài)步行來(lái)移動(dòng)
成功使兩腿交替行走
但每步移動(dòng)花費(fèi)時(shí)間為5秒鐘

介于當(dāng)時(shí)的技術(shù)還不夠成熟
所以那會(huì)本田制造的機(jī)器人雖然能行走
但非常笨拙
經(jīng)常會(huì)摔倒

1988年, E2 機(jī)器人誕生了

它已經(jīng)能夠更像人類那樣行走
步行速度達(dá)到了1.2公里/小時(shí)
一年后
E3 問世
走路的速度已經(jīng)到了3公里/小時(shí)
1991~1993年誕生的E4/5/6
由于加入了平衡控制技術(shù)
在步行時(shí)主體動(dòng)作能保持穩(wěn)定
上樓梯和走斜坡時(shí)再也不容易摔倒
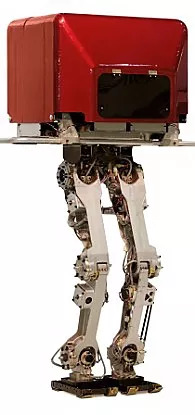
這是1991年的E4
長(zhǎng)了個(gè)紅色大腦袋
這時(shí)Ta 的步行速度已經(jīng)達(dá)到了4.7公里/小時(shí)
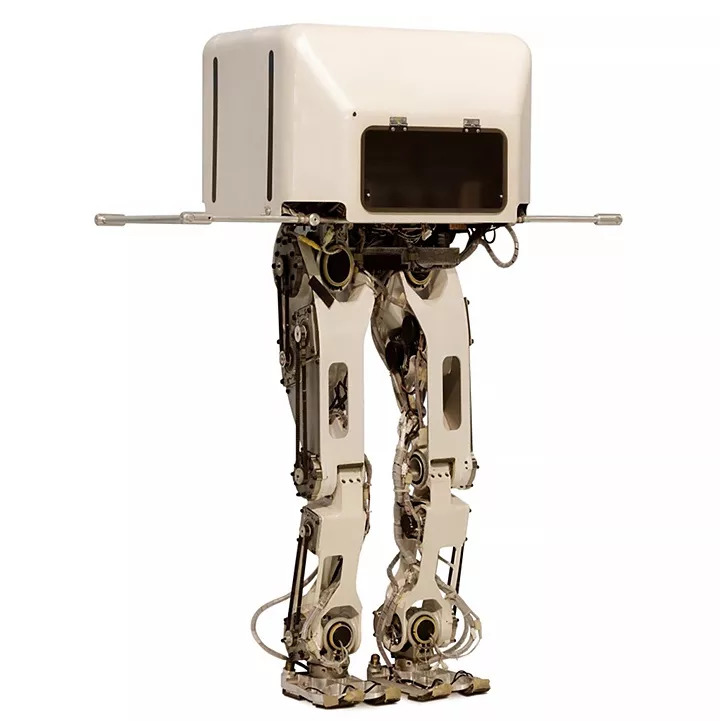
1993年誕生的P1
可以說(shuō)是成了真正意義上的機(jī)器“人”
之前只能算是機(jī)械腿
到了P1 才是真正地加了“上身”
并能模擬人類全身運(yùn)動(dòng)的機(jī)器人
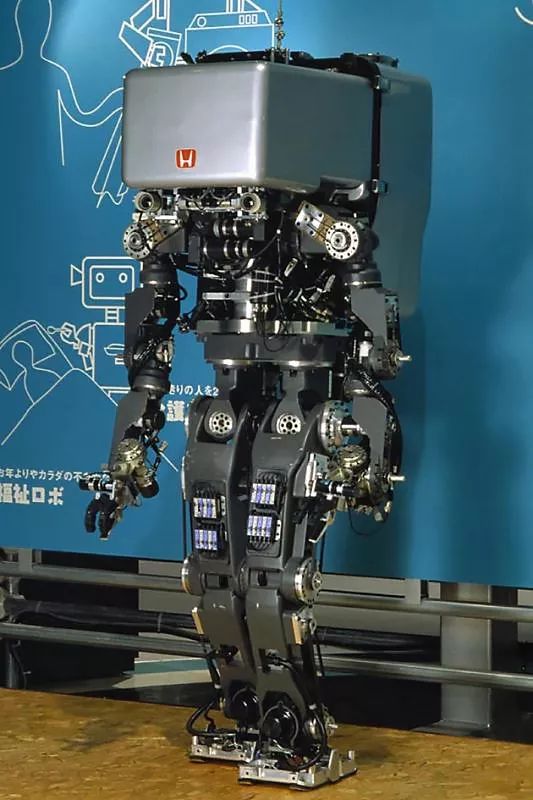
P1電源和控制計(jì)算機(jī)都是放在主體之外
可以實(shí)現(xiàn)開關(guān)門、抓東西搬運(yùn)等動(dòng)作
走路與上下樓梯的步伐更加穩(wěn)健
1996年P(guān)2 問世
這可是世界首個(gè)類人智能雙足步行機(jī)器人

由于把主機(jī)、控制馬達(dá)、電池、無(wú)線通訊等必要的機(jī)器全部藏起來(lái)
不僅實(shí)現(xiàn)了無(wú)線遙控
還使Ta 在外觀上比較“光鮮”

1997年P(guān)3 出現(xiàn)
個(gè)頭和體重比之前的都小了
得益于零配件材料的改良
在電腦實(shí)現(xiàn)分散型的控制之后
機(jī)器人滿足了小型化和輕量化的要求
2000年
第一款公開亮相的ASIMO

當(dāng)時(shí),這個(gè)身高一米二的ASIMO
用流暢的雙腳直立行走方式讓科技界沸騰了
2005年, ASIMO 又做了升級(jí)

此后就真正get了奔跑的技能
速度可達(dá)6公里/小時(shí)
ASIMO 在2007年、2011年和2014年又進(jìn)行了幾次升級(jí)。
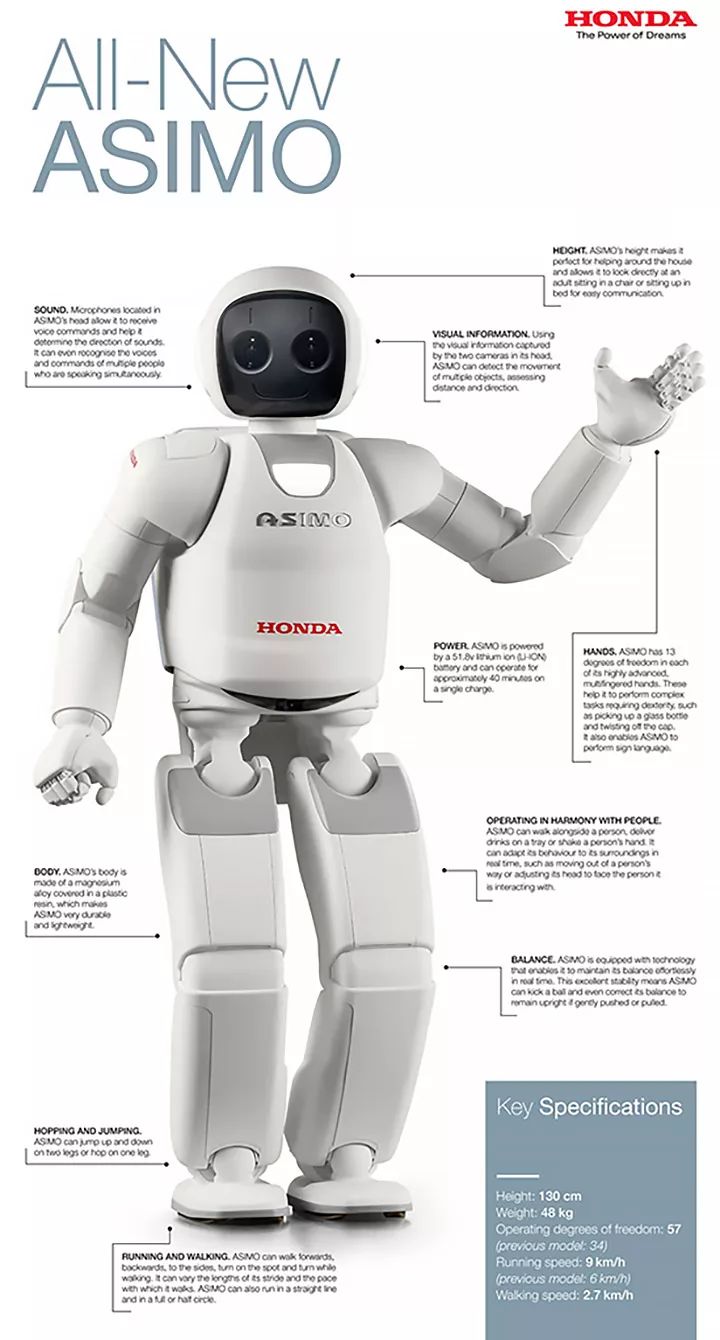
最新版本的Asimo已經(jīng)具備了類似人類的步行方式,不僅能以將近9公里的時(shí)速奔跑和倒行,還能倒退走、單腳跳躍、雙腳跳躍。

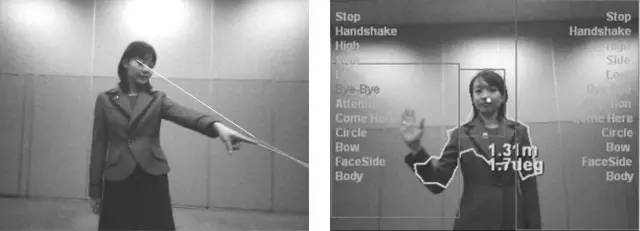
最厲害的是,走在大街上Asimo不但可以通過捕捉周圍的人的位置和動(dòng)作判斷情況,還可以同周圍的人進(jìn)行溝通交流。

Asimo還可以對(duì)向其走來(lái)的人群的行動(dòng)路線進(jìn)行預(yù)估判斷,可以大約判斷出接下來(lái)幾秒鐘行人可能行進(jìn)的路線、軌跡,通過自身的系統(tǒng)計(jì)算并規(guī)劃出一條自己的替代路線,可避免與人類發(fā)生碰撞。

ASIMO配置有兩個(gè)攝像頭眼睛(視覺傳感器)、由激光傳感器和紅外傳感器結(jié)合而成的接地傳感器(用于探測(cè)地面的地面上的障礙物)、可以測(cè)出周圍三米范圍內(nèi)物體的超聲波傳感器和用于控制力度的壓力傳感器等。
Asimo可以進(jìn)行踢足球、跳舞等要求整體協(xié)調(diào)性較高的一些運(yùn)動(dòng)。

2016年本田展示的新版本的ASIMO機(jī)器人
其最大的亮點(diǎn)在于手部活動(dòng)的突破
據(jù)介紹,ASIMO的每只手都擁有13個(gè)自由運(yùn)動(dòng)軸,憑借這一點(diǎn),它已經(jīng)能夠成為一個(gè)合格的手語(yǔ)表演者。
看一下視頻
↓↓
友情提示,建議在wifi下欣賞,留著流量學(xué)知識(shí)!
同時(shí),本田的研究人員還對(duì)ASIMO的下肢進(jìn)行了改進(jìn),新版本機(jī)器人擁有更好平衡性,能夠更快、更平穩(wěn)的攀爬樓梯。


總的來(lái)說(shuō),ASIMO2016年已經(jīng)可以完成很多類似人類活動(dòng)的工作。

ASIMO罰點(diǎn)球的姿勢(shì)與人類非常相似
控制ASIMO的行走姿態(tài),工程師主要實(shí)現(xiàn)了以下三個(gè)方面的控制:
1. 水平反應(yīng)控制:在不平整的地面上運(yùn)動(dòng)時(shí)可以保持平衡。
2. 目標(biāo)ZMP控制:當(dāng)機(jī)器人不能站穩(wěn)開始跌倒時(shí),它可以向相反的方向調(diào)整自己的上半身位置以避免倒下。于此同時(shí),它也會(huì)向前加快速度以快速平衡下降趨勢(shì)。
3. 步長(zhǎng)位置控制:當(dāng)目標(biāo)ZMP控制激活時(shí),它調(diào)整機(jī)器人的步長(zhǎng)讓身體的姿態(tài)和運(yùn)動(dòng)速度和步長(zhǎng)保持在正確的相對(duì)水平上。

另外,通過本田研發(fā)的I-Walk技術(shù)(智能實(shí)時(shí)靈活行走技術(shù)),ASIMO還實(shí)現(xiàn)了預(yù)測(cè)運(yùn)動(dòng)控制,讓ASIMO可以根據(jù)當(dāng)前速度在轉(zhuǎn)彎前計(jì)算轉(zhuǎn)彎的向心力,并得出最佳的轉(zhuǎn)彎角度,避免機(jī)器人跌倒,因?yàn)檫@個(gè)過程是實(shí)時(shí)的,所以ASIMO可以不用停頓就完成轉(zhuǎn)彎過程。

ASIMO機(jī)器人在各場(chǎng)景展示視頻
↓↓
ASIMO 機(jī)器人工作場(chǎng)景
↓↓
要知道這都是兩年前的ASIMO
看到Atlas機(jī)器人的三連跳之后
我們也很好奇
現(xiàn)在的ASIMO又會(huì)是一種什么情況呢
它是否實(shí)現(xiàn)了再次升級(jí)?

可惜
圍繞可雙足步行的類人型機(jī)器人研發(fā)
日本軟銀集團(tuán)收購(gòu)美國(guó)波士頓動(dòng)力公司后
高運(yùn)動(dòng)性能的機(jī)器人Atlas的快速崛起
使得業(yè)界競(jìng)爭(zhēng)愈發(fā)激烈
2018年6月28日
本田技研工業(yè)
正式宣布人形機(jī)器人ASIMO終止開發(fā)
科研小組也相繼解散
本田將實(shí)行致力于研究更為實(shí)用的機(jī)器人技術(shù)的新方針
本田表示今后將把ASIMO研發(fā)的“遺產(chǎn)”:高平衡性及控制運(yùn)動(dòng)技術(shù),應(yīng)用于更多研發(fā)領(lǐng)域,如研制防摔性能的摩托車,以及具備護(hù)理功能的可裝配型機(jī)器人的研發(fā)。

從走到跑
ASIMO的技術(shù)孤獨(dú)領(lǐng)跑了30年
我們的雙足類人機(jī)器人還處于低級(jí)階段時(shí)
它已經(jīng)轉(zhuǎn)身離去
再見
ASIMO


