







文/新戰(zhàn)略機(jī)器人全媒體 彭晴
隨著智慧物流的不斷發(fā)展,移動搬運(yùn)機(jī)器人的應(yīng)用領(lǐng)域也在不斷擴(kuò)大,面對越來越復(fù)雜的應(yīng)用場景,移動機(jī)器人的揀貨方式也越來越多樣化,今天,我們就來盤點一下當(dāng)前全球最先進(jìn)的7種移動搬運(yùn)機(jī)器人的揀貨新路線。
1、類kiva式
揀貨路線:貨架到人
在電商倉儲行業(yè),類KIVA式AGV應(yīng)用最為廣泛,利用機(jī)器人頂部升降圓盤將貨物舉起,根據(jù)無線指令的訂單將貨物所在的貨架從倉庫搬運(yùn)至員工處理區(qū),從而實現(xiàn)其獨(dú)特的“貨到人”揀選優(yōu)勢。
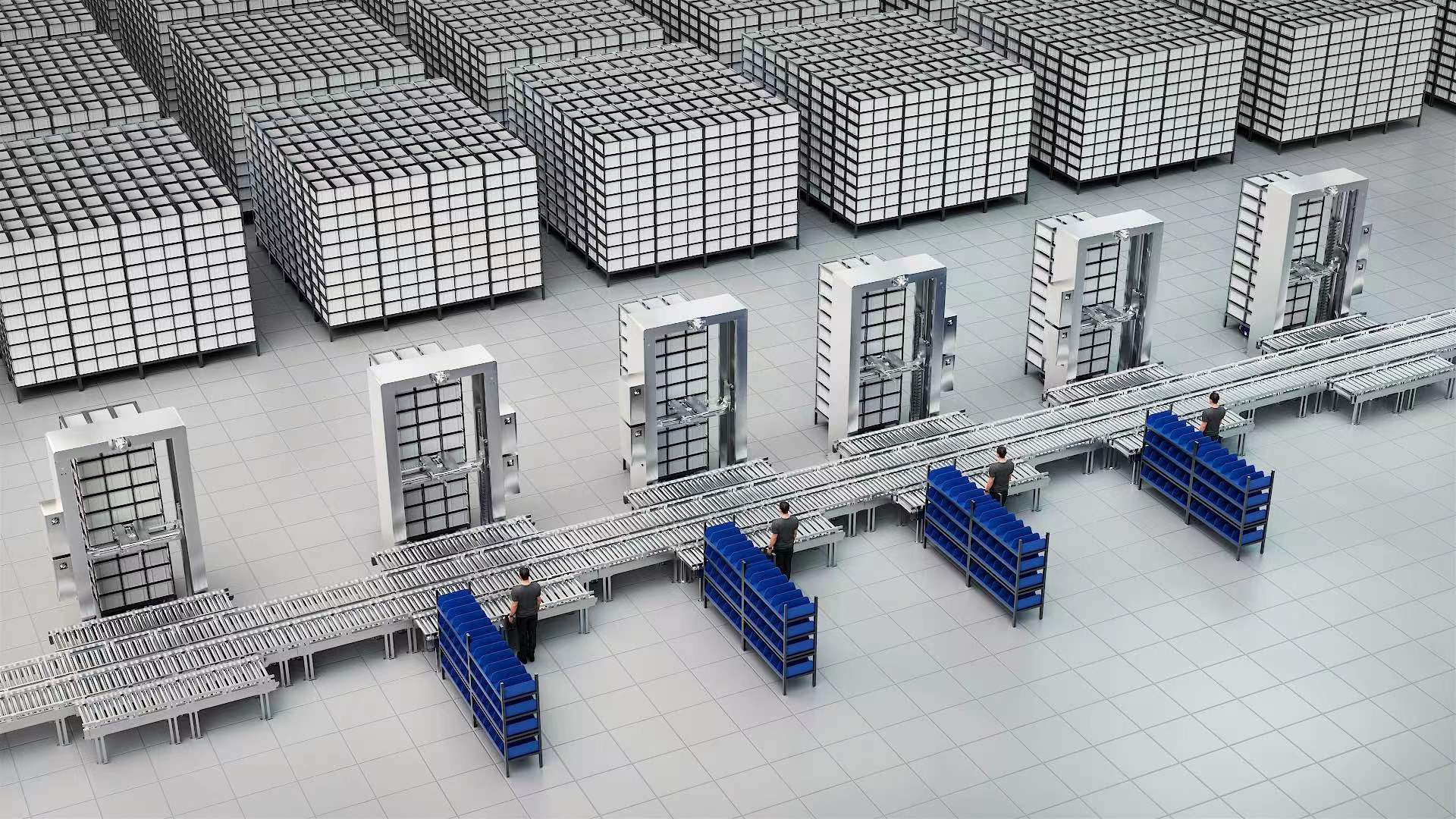
2、同軸叉車
揀貨路線:貨箱到貨架
技田信息的SOOKOO機(jī)器人模式是這樣的:分揀員面前有一個緩沖貨架,技田機(jī)器人取出目標(biāo)貨箱后會把它運(yùn)送到緩沖貨架上,人拿不拿SOOKOO不管,它放完就走,下一個SOOKOO再將拿來的貨箱放到暫存貨架上另外一個空庫位上,這樣機(jī)器人就避免了等待的時間,會更有效率。
3、Picking AGV
揀貨路線:貨箱到人
與類KIVA式移動機(jī)器人相比,國自機(jī)器人推出的Picking AGV可直接鎖定目標(biāo)SKU,并且一次可收集至少5個目標(biāo)SKU箱,且從貨架區(qū)到工作站只需走一次,Picking AGV還具有一個自由旋轉(zhuǎn)的裝載平臺,在叉卸貨時無需轉(zhuǎn)彎,極大降低了存儲貨架區(qū)巷道寬度的要求。
4、輪腿式機(jī)器人 Handle
揀貨路線:吸盤抓取
2017 年,波士頓動力推出輪腿式機(jī)器人 Handle,后經(jīng)改裝,將原來的雙臂被換成了機(jī)器人頭頂?shù)拇笮臀P式抓器。它將原版機(jī)器人變成了真正可用的機(jī)器——可以自動裝載和卸載倉庫中的貨物箱。波士頓動力表示,從技術(shù)層面來看,Handle 可以搬動 30 磅重的箱子(視頻中搬了約 12 磅重的箱子),并且可以把托盤堆疊到大約 1.2 米深和 1.68 米高。
5、攀爬式AGV——BionicHive
揀貨路線:攀爬抓取
BionicHive機(jī)器人是在貨架最外沿憑借單個軌道移動,機(jī)器人配備有小型機(jī)械臂,機(jī)械臂依靠吸盤吸取貨物。機(jī)械人接收訂單,攀爬至貨架,用機(jī)械臂上的吸盤直接將貨物平移到機(jī)器人的載貨平臺上,然后返回地面。
6、機(jī)械手+移動平臺——Fetch & Freight
揀貨路線:“手腳”配合
Fetch Robotics的機(jī)器人系統(tǒng)使用了相對同類產(chǎn)品比較大的移動機(jī)械臂平臺Fetch,用于將指定貨架上的貨物取下來,放到Freight上。Fetch可以進(jìn)行連續(xù)的貨物抓取工作,它不必停下,因為一隊Freight將及時地將貨物送到它們該去的各個地方。
7、跟隨式AGV——Locus Robotics
揀貨方式:跟隨揀貨
Locus內(nèi)置的軟件系統(tǒng)會指導(dǎo)Locus走到特定物品的貨架位置。在那里會有專門的工作人員,他通過iPad讀取貨物的描述,然后將該貨物放到機(jī)器人身上的塑料籃子里。在整個運(yùn)送過程中,工作人員只是在特定的巡視區(qū)拿貨,檢查貨物是否有損壞,不用搬著貨物走動。
在上述列舉的移動機(jī)器人揀貨路線中,有一些已經(jīng)得到了成熟應(yīng)用,但有些還在驗證階段,不過從整體的發(fā)展方向來看,移動機(jī)器人的揀貨方式正沿著簡單、便捷、高效率的方向發(fā)展,同時,這也是整個智能物流行業(yè)發(fā)展的大方向。


