








從40年代初,眾多單機自動化加工設備的出現,到當下以智能倉儲、物流為代表的智能化、自動化工業(yè)興起,我國工業(yè)化有了迅猛的發(fā)展,就在剛剛過去的618全球年中購物節(jié)上,京東物流啟用了號稱“亞洲電商物流領域規(guī)模最大”的智能物流倉群,讓人們眼界大開,值得注意的是,AGV叉車的創(chuàng)新發(fā)展,極大降低生產成本,提高運行效率,更是讓人眼前一亮。
據了解,人工叉車改造為AGV叉車的原理為,激光AGV在現有叉車上安裝有可旋轉的激光掃描器,在運行路徑沿途的墻壁或支柱上安裝有高反光性反射板的激光定位標志,AGV叉車依靠激光掃描器發(fā)射激光束,然后接受由四周定位標志反射回的激光束,車載計算機計算出車輛當前的位置以及運動的方向,通過和內置的數字地圖進行對比來校正方位,從而實現物料自動搬運。

1. 減少現場傷害
內置的安全協(xié)議和傳感器可防止危險事件的發(fā)生,且不會影響其他交通。
2. 節(jié)省資源
無人駕駛的搬運作業(yè)可以優(yōu)化人力資源。
3. 節(jié)省成本
始終如一的、可重復的物料搬運可大幅降低產品、材料和場地方面的損耗。
4. 安全性高
自動化叉車嚴格按照規(guī)定路線行駛,當行駛路線上有障礙物或行人時會自動停車或主動避讓,大大降低了人工開叉車帶來的不確定性。
5. 提升自動化程度
利用計算機技術,無線網絡,結合物料管理系統(tǒng),倉庫管理系統(tǒng),車輛調度管理系統(tǒng)等,實現工廠、倉庫管理運行的自動化。
6. 適應各種工作環(huán)境
可以在沒有光線和沒有溫度調節(jié)的區(qū)域執(zhí)行物料搬運,最大程度減少了對人員的影響。
AGV叉車的組成結構1、地圖生成系統(tǒng)
掃描工作環(huán)境,生成環(huán)境地圖,是AGV運行的基礎條件,要求生成地圖快速、準確,地圖更改方便
2、任務調度系統(tǒng)
對AGV的任務進行設定,對多臺AGV進行任務調度,方便隨時更改
3、定位導航裝置
利用激光掃描儀或攝像頭,獲取環(huán)境特征或標志,時時定位
4、運動控制系統(tǒng)
取代或并聯(lián)原車控制系統(tǒng),對運動、提升等動作進行控制
5、運動驅動系統(tǒng)
采用舵輪等方式
6、貨物相關傳感器系統(tǒng)
負責貨架、貨物的檢測,包括掃碼、存在檢測、負載檢測等
7、安全系統(tǒng)
障礙掃描,避障,警示燈,報警聲音等
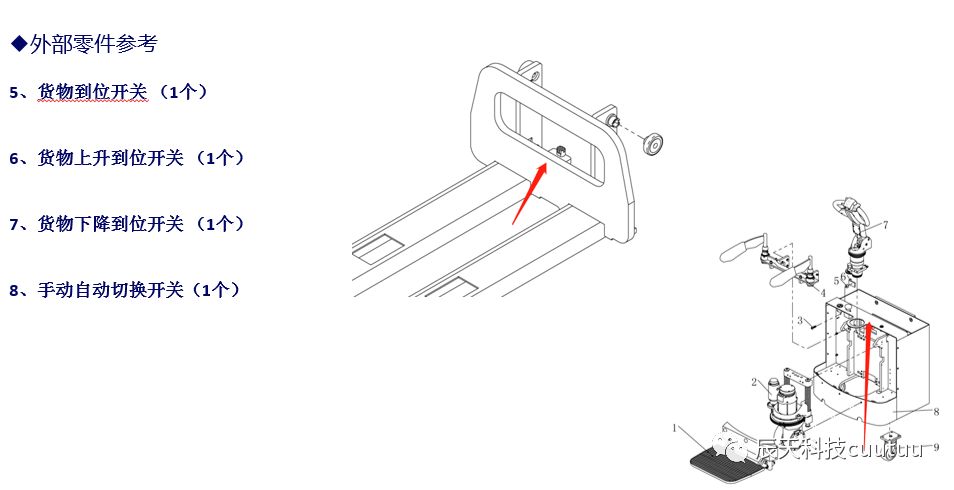
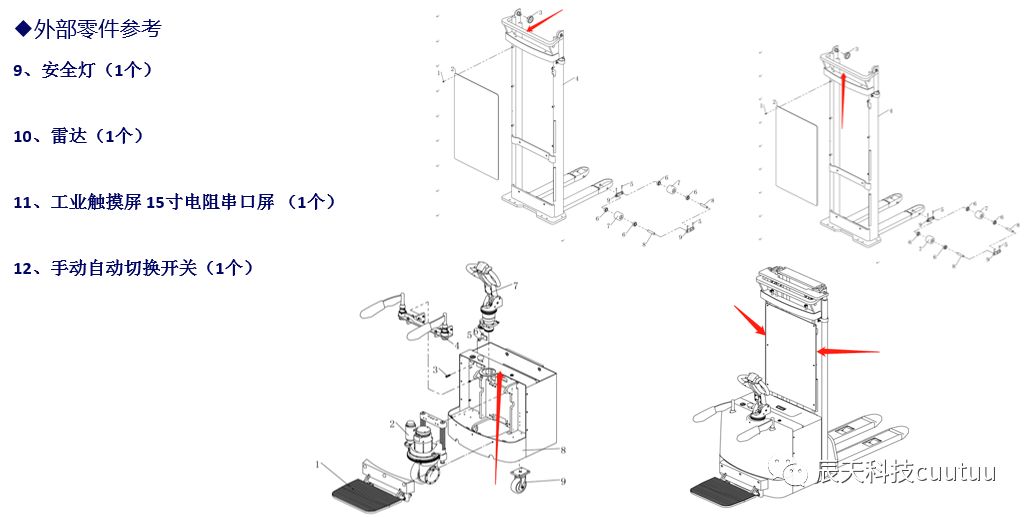
叉車內外部零件參考
其中最為重要的是定位導航及運動控制。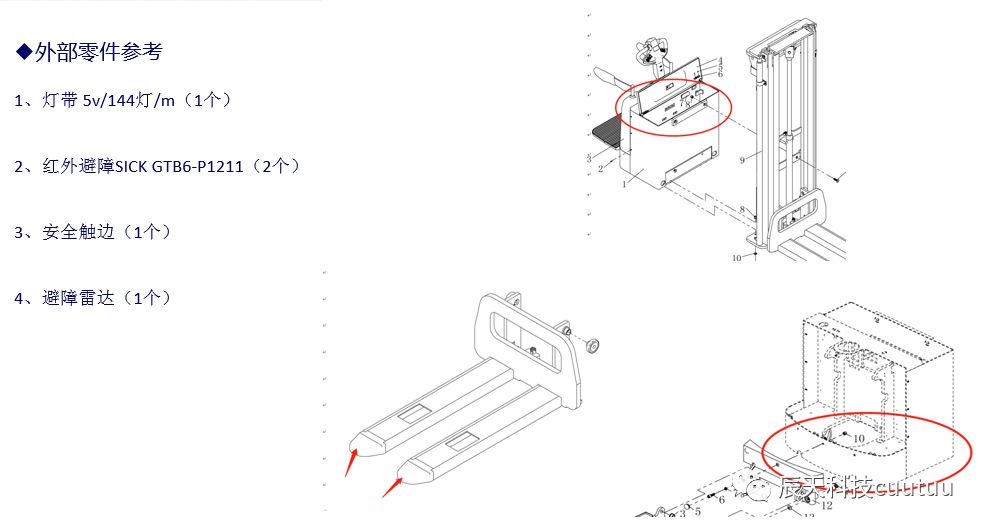

在定位導航中,針對叉車的改造目前主要有兩種方式,一種是基于反光板的導航,另一種是基于固定環(huán)境的導航,兩種方式都要基于激光掃描儀。辰天科技旗下的Q600 工業(yè)激光定位導航器(以下簡稱Q600),采用先進的定位導航算法,利用激光雷達的掃描數據,安全可靠地輸出定位信息,為各種工業(yè)自動導航車輛(AGV),提供定位數據。Q600 同時還集成了AGV調度系統(tǒng)接口和底盤控制器接口,極大地簡化了 AGV車輛的開發(fā)和生產工作。



