








物流無人化步入“新周期”,倉儲環節成首發戰略點
2020年物流行業開局最大的熱點便是無人化,雖然疫情對現有行業造成了部分沖擊,但同時也蘊藏著機會——被按下暫停鍵的“無人駕駛”即將重啟,“機器換人”或再掀浪潮。隨著市場需求的加速釋放,在技術、資本的加持下,物流無人化將步入“新周期”。
從當前物流的整體結構看,整個物流體系是一張縱橫交錯的“網”,銜接的“節點”包括物流大倉、企業倉及和區域分撥點,交錯的“線”則是干線運輸、配送運輸以及“最后一公里”配送等運輸服務。從技術支撐及技術成熟度上看,基于路面無人駕駛技術的“線”部運輸尚在醞釀,而處于“節點”部分的各類倉儲無人化技術已經趨于成熟,逐步成為物流無人化重要戰略點。

倉內無人搬運剛需明顯,無人叉車潛力巨大
在市場需求、科技進步等多方面因素的推動下,傳統倉儲體系加快推進無人化進程。倉內無人作業設備主要包括自動分揀機器人、可穿戴設備、無人駕駛叉車以及貨物識別設備,目前自動分揀技術已經相對成熟,可穿戴設備、貨物識別處于研發階段,兼顧了技術成熟度及性價比的無人叉車備受親睞。
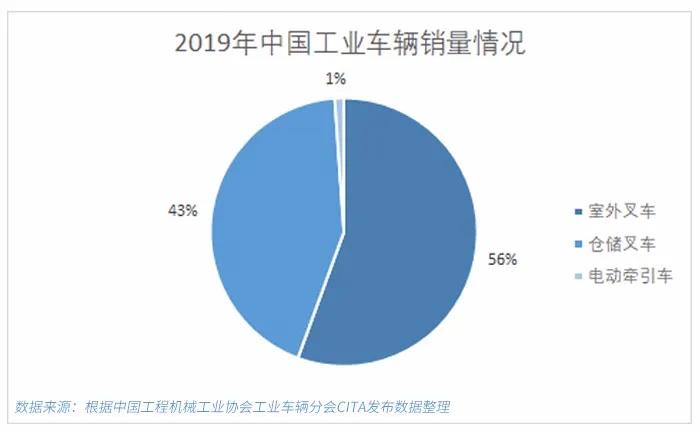
根據CITA發布的數據顯示,我國2019年工業車輛銷量突破60萬臺,同比約增長2%,其中用于室外搬運的工業車輛約31萬臺,占比56%,室內倉儲叉車約29.86萬臺,占比43%,并且近年有上升的趨勢。隨著“機器換人”的逐步深入,無人叉車剛需明顯,市場潛力巨大。
密集倉儲場景復雜,無人叉車亟需攻克4大難點
從倉內作業場景看,無人叉車替代人工叉車的剛需場景有兩個:1、裝卸貨車場景,貨車分為貨廂式、雙飛翼、平板式,外月臺,工作環境分為外月臺、工廠內、純室外堆場;2、密集存儲場景,包括:駛入式貨架、橫梁式高貨架、窄通道貨架、雙深度貨架、穿梭式貨架以及堆疊式貨架等。其中,室內密集倉儲場景隨著自動化集成程度的加深,無人化條件趨于成熟,也是目前無人叉車投放的主要場景。

“基于中高層貨架的密集倉儲空間利用率較高,是目前主流的倉儲形式。另一方面,密集倉儲場景工況復雜,對于無人叉車同樣提出了更高的要求”,中國視覺工業無人車輛代表企業未來機器人(深圳)有限公司(以下簡稱“未來機器人”)CEO李陸洋博士分析,這些要求主要體現在:
1)更高的精度:倉儲作業中,從任務的完成度以及安全考慮,對無人叉車對定位精度和操作精度都提出了更高對要;
2)高柔性:無人叉車需要提升柔性化自適應能力,以應對非規范化的人工操作、多種載具及作業空間變化;
3)高效率:在物流行業整體提速的情況下,無人叉車能夠替代人工叉車的程度主要體現在效率上;
4)安全防護:全面的防護不僅體現在行駛過程中對障礙物的識別和規避,還應該考慮在高層貨架高位作業風險,如駛入式貨架、窄通道貨架及移動式堆疊貨架等都需要更安全的技術,以保障人、車、貨的安全。
深耕視覺技術,全面解鎖無人叉車密集倉儲應用場景
要解決當前無人叉車在密集倉儲場景中面臨的難題,就必須依賴于深層次的研究和創新。在談及行業發展時,國家工程質量監督檢查中心副主任陳寶強先生也強調了深層次技術創新的重要性,“缺乏創新就缺少了行業前進的動力,沒有深層次的研究何來創新”。
李陸洋博士在接受新戰略機器人全媒體記者采訪時表示,當前無人叉車亟待提升的是智能化程度,“簡單理解則是機器人應對現場不規范化的能力,而這種能力必須基于對環境的理解與學習,視覺技術是無人叉車智能化提升的必經之路,這也是未來機器人成立3年來一直在做的事情”。

圖:未來機器人視覺導航高位無人叉車
視覺傳感器也是近年無人叉車領域研究的熱點,相對于傳統的激光傳感器,視覺傳感器信息獲取能力強大,也更具有系統拓展性:(1)一張500萬像素的相片有500萬個點的信息量,一秒鐘如果獲取和處理10張圖片,就相當于獲取了5000萬個點的信息量;(2)圖片的點相比于激光多了顏色和紋理信息,為定位、控制和環境感知提供了大量有價值的信息;(3)視覺與5G的結合是完美的,未來如果能夠將圖像信息通過高速網絡傳輸到云端做邊緣計算或傳輸到服務器做并行計算,可以進一步大幅提高視覺導航的性能。
據悉,未來機器人多年來一直深耕視覺導航技術領域,憑借著獨特的技術路線及后期強大的成長和爆發力,目前未來機器人不僅完成了全球首例高位前移式叉車的無人化改造,更是挑戰了當前無人碼垛領域難度最高的4層以上料筐精準堆疊技術,該項技術已經在華南汽車零配件廠商巨頭的無人倉儲方案的項目中得到了實際的應用。3年來,未來機器人研發的視覺無人叉車產品已累計應用到150多個復雜場景,涵蓋物流、保稅、快消品等多個領域頭部企業國內中高層密集倉儲無人取放貨項目。

案例一:未來機器人視覺無人叉車在堆疊式貨架場景的應用
場景難點:30多種位置隨機的帶輪子料框堆疊,對無人叉車對智能化程度、操作精準度是巨大的考驗。

案例二:未來機器人視覺無人叉車在橫梁式高貨架場景的應用
場景難點:高位取放貨意味著相對于平面搬運,還需要進一步對貨架庫位進行檢測,檢測意味著時間的增加,無人叉車需要在效率、精度、智能化程度、安全性四者之間的平衡作決策。

場景難點:駛入式貨架作業空間有限,對無人叉車定位精度和取放貨精度要求是所有貨架中最高的;此外,由于“華容道”式的放貨節奏,無人叉車的作業效率也是重大的挑戰。
據了解,未來機器人將進一步聚焦視覺無人叉車的共性需求和痛點,解鎖室外裝卸貨場景應用,提升工業無人駕駛叉車的應用廣度和深度、創新管理模式和業務模式,為更多的企業提供高效解決方案。



