







文/新戰略機器人全媒體記者 潘鳳儀
眾為興的驅控一體是一款專門針對桌面機器人而開發的機器人控制系統,巧妙地將伺服驅動技術、運動控制技術和機器視覺技術融合在一臺控制器上,充分滿足細分行業的應用定制和工藝定制需求。

刻苦鉆研,精簡控制驅動系統結構
國內工業機器人系統,大多仍采用一個運動控制器加多個伺服驅動器的分布式控制方式,在實際應用中存在系統硬件冗余度高、信號傳輸易受干擾及價格昂貴等問題。眾為興的驅控一體化技術,很好的解決了上述問題,助力國產機器人技術水平上升一個新高度。
簡約,卻不簡單
驅控一體不是簡單將運動控制和伺服驅動放在一個盒子里。眾為興的驅控一體實現了,所有機器人的關節軸的控制用一個芯片來完成,同時控制和伺服采用并行總線,所有軸和軸之間可以達到神經級別的通信速率。
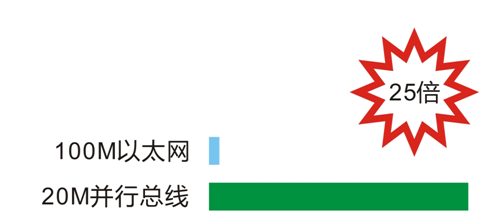
驅控一體用16位的并行總線20M的帶寬,這相當于100M以太網的25倍,同步抖動更是在1ns內;同時眾為興的驅控一體采用了控制算法混合驅動算法,系統實時的直接能獲取了機械手臂各軸的各種信息,可根據機械手運行姿態的變化實時的調整控制信息。
機器人做的好不好,得先能看得到
眾為興花了十余年的時間鉆研機器人,最先研究的不是機器人的算法,而是測試和診斷工具。有了測試方法和診斷工具,才能把機器人這東西看透、看明白。眾為興的開發理念是:不能說一定能把機器人做到最好,但我們一定要知道,我們不好在哪里。
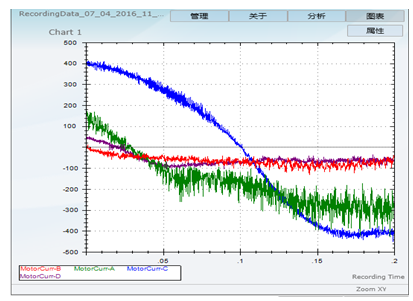
眾為興驅控一體能夠成為驅控一體化的標桿,最大的亮點在于能夠實時采集機器人的各種信息。眾為興在伺服技術上運用了示波器功能,驅控一體也繼承了這一特性,驅控一體可以同時采集所有軸瞬間的一百多個狀態信息,下圖是我們采集四個關節的同一瞬間的電流,我們可以很清晰的看到每個關節的負載情況,算法有沒有做對,電機的性能好不好,一目了然。
眾為興驅控一體,可以讓機器人實現:
輕松拖拽,可以讓機器人的編程交互變得很直觀。
振動抑制,獨特的末端振動抑制算法,可以保證機械手的工作精度。
四點標定,可以讓機器人裝配后直接上產線,然后在在線標定。機器人用久了,精度變差了,隨便拖拽示教幾個點,就可以恢復精度。
編程簡單,支持AR語言編程、G代碼編程、拖拽編程。
離線仿真,手持器上可以進行機械手動作軌跡動態仿真。
調試方便,驅控一體實現參數自整定。
運行流暢,連續軌跡速度自適應模型,能夠保證機械手流暢的運行。
驅控一體滿足了機器人應用市場上的經濟性和適用性需求,通過眾為興的訪談中,我們看到了更明朗的驅控一體化藍圖和國產機器人新希望。


