








下面我們就總結(jié)一下離線(xiàn)編程中誤差的來(lái)源以及如何使這些誤差最小化。
【誤差來(lái)源一:TCP測(cè)量誤差】
首先就要說(shuō)說(shuō)TCP了,想必看過(guò)小萌文章的伙伴們對(duì)此都不陌生了。TCP就是工具中心點(diǎn),如果機(jī)器人工作連自己拿著的工具的中心點(diǎn)都找不到在哪里,可想而知這個(gè)誤差有多大。所以我們就要對(duì)TCP進(jìn)行測(cè)量,測(cè)量后我們要將誤差控制在認(rèn)可范圍內(nèi),然后對(duì)其測(cè)量結(jié)果進(jìn)行驗(yàn)證,可以在固定點(diǎn)處進(jìn)行重定位操作,檢驗(yàn)機(jī)器人在固定點(diǎn)處進(jìn)行多姿態(tài)運(yùn)動(dòng)時(shí)是否在規(guī)定誤差范圍之內(nèi)。

【誤差來(lái)源二:工件幾何與定位誤差】
最后就是機(jī)器人誤差了,也有兩個(gè)方面:
一方面是機(jī)器人本身在加工與裝配過(guò)程中所產(chǎn)生的誤差,這就導(dǎo)致了最后生成出來(lái)的機(jī)器人,與其設(shè)計(jì)時(shí)的DH參數(shù)不可能完全一樣,正如世界上沒(méi)有兩片完全一樣的樹(shù)葉,世界上也沒(méi)有兩個(gè)完全一樣的機(jī)器人。
另一方面就是機(jī)器人絕對(duì)定位誤差。所有機(jī)器人廠家都沒(méi)有跟你講過(guò)的一個(gè)事實(shí)。在各大機(jī)器人公開(kāi)的標(biāo)稱(chēng)參數(shù)中,都是重復(fù)定位精度,可以達(dá)到0.05mm,或者0.02mm,但不會(huì)有一家提供絕對(duì)定位精度的。絕對(duì)精度就是指實(shí)際值與理論值的一致程度。我們控制讓機(jī)器人移動(dòng)到每個(gè)目標(biāo)點(diǎn),機(jī)器人實(shí)際到達(dá)點(diǎn)與目標(biāo)點(diǎn)之間存在著一定的距離誤差。我們給定相同的坐標(biāo)X,Y,Z,讓機(jī)器人三次以不同的姿態(tài)指向它,結(jié)果竟是這樣不靠譜,這讓多少對(duì)機(jī)器人崇拜的機(jī)器人愛(ài)好者們的心碎了一地。但情況其實(shí)并沒(méi)有那么糟,這種絕對(duì)誤差只有在機(jī)器人極限的姿態(tài)下才會(huì)比較大,而舒服的姿態(tài)時(shí),誤差相對(duì)比較小,而且也是因“人”而異。
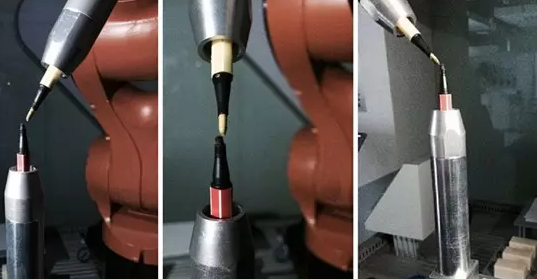
通過(guò)消除以上三方面的誤差來(lái)源,可以使離線(xiàn)編程的精度大大提高,從而可以使機(jī)器人很好的應(yīng)用于打磨、去毛刺、切割、噴涂等復(fù)雜軌跡領(lǐng)域。作為國(guó)內(nèi)第一品牌商業(yè)化機(jī)器人離線(xiàn)編程軟件的RobotArt,正式推出后,徹底打破了國(guó)外軟件壟斷的局面,大大降低了國(guó)內(nèi)機(jī)器人應(yīng)用的成本,同時(shí)為國(guó)內(nèi)機(jī)器人應(yīng)用提供了更好的服務(wù)。我們期待國(guó)人能夠做出更多類(lèi)似RobotArt這樣優(yōu)秀的機(jī)器人離線(xiàn)編程軟件


