








傳統印象里的機器人,不管是工業用的還是家庭用的,不管長得像不像人,似乎都是“鋼筋鐵骨”,冰冷、笨重,有時候看著還有點侵略性。
不過,加州大學圣迭戈分校(簡稱UCSD)的研究人員最近發明了一款新型軟體機器人,不僅能夠輕松擰燈泡、擰瓶蓋、轉螺絲刀,甚至還能捏住一張薄薄的紙。
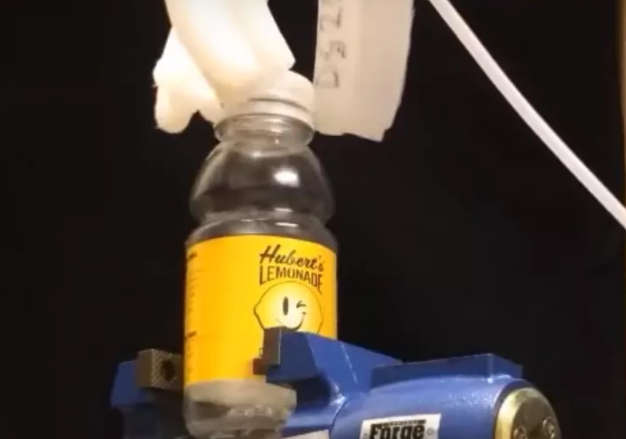
擰瓶蓋
“我們開發的這款軟體機器人抓手使用觸覺傳感技術對其所接觸的物體進行建模,”UCSD的機器人專家Michael Tolley對digitaltrends說,“通過反復觸摸和旋轉物體,機器人抓手可以繪制出該物體的點云圖(點云是產品外觀表面的點數據集合),從而感應正在操縱的物體,感覺起來就像是我們在自己的口袋里摸鑰匙。”
“這個機器人抓手在旋轉、感應和模擬物體的能力方面是獨一無二的,并且可以在光線較暗、能見度低和不確定的環境下工作,”Michael Tolley補充道。
從圖片中我們能看出,該機器人抓手有三根柔軟的“手指”,每根“手指”由三個氣動柔性驅動器組成,施加氣壓便可移動。
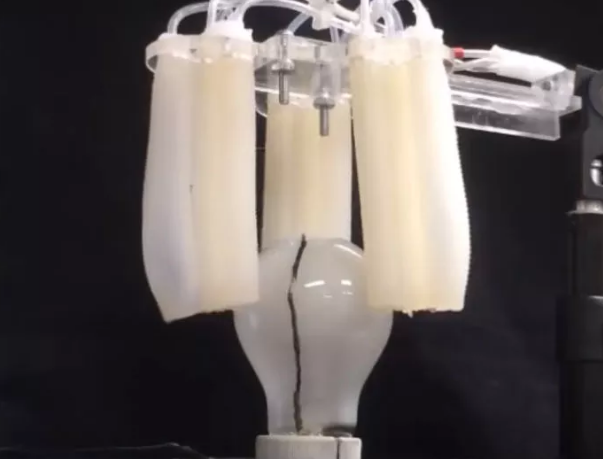
此外,每根“手指”外面都包裹了一層由硅橡膠制成的智能“皮膚”,其中嵌入了由導電碳納米管制成的傳感器。碳納米管的電導率會隨手指的彎曲程度變化,“皮膚”可以感應抓手所握持的物體的信息,之后記錄并檢測“手指”什么時候移動、什么時候與物體接觸。
接著傳感器產生的數據會被傳送到控制板,進而創建正在操縱的物體的3D模型。整個過程類似于CT掃描,2D圖像截面會生成3D模型。
當研究人員把該抓手連接到Fetch Robotics的機器人手臂進行測試時,發現它能夠執行一系列精密的任務,比如上文提到的擰燈泡、轉螺絲刀以及握住紙張等。

該團隊下一步的研究計劃是將機器學習和人工智能添加到數據處理系統中,以便機器人抓手能夠語義識別其所抓取的對象,而不僅僅是對物體進行建模。研究人員還將嘗試使用3D打印技術來制作抓手模型,讓它變得更耐用。
工程師Michael Tolley表示,由于團隊在軟體機器人制造領域積累了比較多專業知識和經驗,實現這些突破是可能的。他希望機器人抓手未來可以應用到水果采摘、食物處理或者家庭服務等領域。
而要做到這一點,團隊還需要測試更多種類的物體,因為不同的對象需要機器人找好不同的定位和方向,借此訓練可以不斷優化機器人抓手的表現。Michael T. Tolley和他的團隊在9月底舉辦的國際機器人頂級會議IROS上發表了該研究成果,感興趣的朋友可以戳閱讀原文了解更多信息。


